
Radargestuurde verlichting: automatische trapverlichting met personendetectie
op

PIR-gestuurde oplossingen voor aanwezigheidsdetectie zijn populair, maar ze detecteren geen stilstaande lichamen. Dit doe-het-zelfproject met radarregeling is een handig alternatief. Volg mee als je radar wilt gebruiken om de verlichting van een donkere trap te regelen.
De HLK-LD2410 radarmodule
Je kent vast wel die automatische lampen die worden geschakeld door PIR-sensoren. Ze gaan aan als je erlangs loopt en gaan automatisch uit als er geen beweging meer wordt gedetecteerd. Hoe praktisch ze ook zijn, ze hebben een eigen wil, waardoor ze zich soms een beetje vreemd gedragen. Met de introductie van goedkope radar-personendetectoren is het mogelijk geworden om enkele van de problemen van een PIR-sensor op te lossen. Radardetectoren bieden echte aanwezigheidsdetectie, zelfs als je niet beweegt, waardoor het licht ook blijft branden als je op het toilet zit te lezen. Het is radar, dus het is immuun voor vals-positieve detectie door veranderende lichtomstandigheden, een voorbijvliegende bij, bewegende warme lucht enzovoort.
De HLK-LD2410 sensor is zo’n hooggevoelige personendetectiemodule. Hij werkt bij een golflengte van 1,2 cm (ook bekend als 24 GHz amateur-, amateursatelliet-, radiolocatie- en aardexploratie-satelliet serviceband) ver van de drukke 2,4 GHz WiFi-band. De module is ontwikkeld door Hi-Link Electronics en biedt personendetectie voor domoticasystemen. Het werkingsprincipe is gebaseerd op frequentiegemoduleerde continue golf-radar (frequency modulated continuous wave, FMCW) om zowel bewegende als niet-bewegende lichamen te detecteren.
FMCW-radartheorie in het kort
De radar is gebaseerd op twee werkingsprincipes. Ten eerste gebruikt hij het dopplereffect om objecten te detecteren. Een continue-golfsignaal (CW) wordt uitgezonden en vervolgens gereflecteerd door geleidende materialen zoals metaal of water, en dus ook door menselijke lichamen. Wanneer het reflecterende object (het doel) beweegt, verandert de golflengte van het gereflecteerde signaal (en dus de frequentie) evenredig met de snelheid van het doel. Dit staat bekend als het dopplereffect. We kennen het allemaal van het geluid van voorbijrijdende auto’s en treinen. De toonhoogte van het geluid is hoger als het voertuig naar je toe komt en lager als het zich van je verwijdert.
De afstand van een doel kan met een CW-radar worden gemeten door frequentiemodulatie (FM) toe te voegen. Wanneer de signaalfrequentie lineair omhoog (of omlaag) wordt gesweept, zal het ontvangen gereflecteerde signaal niet dezelfde momentane frequentie hebben als het uitgezonden signaal omdat het vertraagd is. De twee frequenties verschillen enigszins en dit verschil is evenredig met de afstand tussen de zender en het doel. Omdat er echter ook het dopplereffect in het spel is, werkt deze methode alleen nauwkeurig voor statische of langzaam bewegende objecten.
Alle complexiteit van de bovenstaande uitleg is in de HLK-LD2410 module gereduceerd tot een enkele digitale uitgang die de status van het gedetecteerde doel aangeeft. De uitgang is hoog wanneer een persoon wordt gedetecteerd, al dan niet bewegend. De toepassing die de radarmodule gebruikt, kan dus eenvoudig blijven omdat deze alleen op een binair signaal hoeft te reageren.
De schakeling
De toepassing die in dit artikel wordt beschreven is een automatische verlichting voor een trap (figuur 1). Een radar-gebaseerde personendetector schakelt de verlichting in wanneer iemand wordt gedetecteerd, en anders uit. Bovendien mag het systeem alleen werken als het donker is (dus detectie van (de afwezigheid van) licht). Het schema van de schakeling is getekend in figuur 2.

Een lichtafhankelijke weerstand (LDR, R2) wordt gebruikt om te detecteren of het donker is. In het donker is de weerstand van R2 hoog, veel hoger dan de waarde van R1 + P1, zodat de spanning op de gate van IC1 hoog is. Dit schakelt IC1 in, waardoor de gate van de P-kanaal MOSFET T1 laag wordt getrokken. T1 begint te geleiden en schakelt MOD1, een goedkope DC/DC-convertermodule, in. MOD2, de radarmodule, wordt nu ook ingeschakeld en de personendetectie wordt geactiveerd. De schakeling staat dus op scherp. Deze situatie wordt gesignaleerd door LED1.

Als er geen mensen zijn, is de uitgang van MOD2 laag. Dit blokkeert N-kanaals MOSFET T2 en wordt de belasting (een LED-string) niet van stroom voorzien. Wanneer een lichaam wordt gedetecteerd, wordt de uitgang van MOD2 hoog en schakelt T2 in, die op zijn beurt de belasting inschakelt. Best wel eenvoudig, nietwaar?
Discoknipper
Er is echter één probleem, en dat is wanneer de verlichting door de schakeling wordt ingeschakeld. De LDR ziet dan opeens licht in plaats van duisternis. De spanning op de gate van IC1 daalt en IC1 schakelt uit. Dit schakelt de rest van de schakeling uit en het licht gaat uit. Nu ziet de LDR weer duisternis en schakelt IC1 in, en zo vervolgens. Het systeem begint te oscilleren.
Om dit discoknipper-effect te voorkomen, zijn R4 en IC2 toegevoegd. IC2 heeft dezelfde functie als IC1, behalve dat deze wordt aangestuurd door de uitgang van de radarmodule in plaats van door de LDR. IC1 en IC2 hebben open-collector-uitgangen en kunnen daarom parallel worden geschakeld om T1 aan te sturen in een bedrade-OR-configuratie.
Zodra een persoon wordt gedetecteerd, wordt IC2 ingeschakeld. Hierdoor blijft het circuit op dezelfde manier gevoed als met IC1, zelfs wanneer IC1 weer uitschakelt. Het licht gaat pas uit als de gedetecteerde persoon verdwenen is. Dit zorgt ervoor dat de schakeling twee stabiele toestanden heeft.
Voeding
De schakeling stuurt een normale LED-string aan met een gelijkspanning tot 24 V. De voedingsspanning moet worden aangesloten op pen 3 (+) en 4 (–) van connector K1. De belasting wordt aangesloten op pennen 2 (+) en 1 (–).
De radarmodule heeft 5 VDC nodig. Daarom wordt MOD1, een goedkope MP1584 DC/DC-convertermodule, gebruikt om de voeding voor de LED-string terug te brengen tot een geschikte waarde voor de radarmodule. Op MP1584 gebaseerde DC/DC-convertermodules zijn online in soorten en maten te vinden, instelbaar of met een vaste uitgangsspanning. Beide kunnen worden gebruikt, zelfs als de uitgangsspanning geen 5 V is, aangezien het voldoende is om een enkele weerstandswaarde te veranderen om een 5V-uitgang te verkrijgen. Gebruik de volgende vergelijking om de weerstandswaarde te berekenen:

Hier is RA de weerstand tussen pen 4 van het MP1584-IC en Vout; RB is de weerstand tussen pen 4 en GND. Op de module die voor ons prototype werd gebruikt, had RB een waarde van 8,2 kΩ. Aangezien de module geconfigureerd was voor een 12V-uitgang, had RA een waarde van 115 kΩ. Om de uitgangsspanning te verlagen tot 5 V, moet RA een waarde hebben van 43 kΩ. Op ons prototype kon dit worden geregeld door een weerstand van 68 kΩ parallel aan RA te solderen. Een andere manier is om RA te vervangen door een weerstand van 39 kΩ in serie met een weerstand van 3,9 kΩ (wanneer RB = 8,2 kΩ).
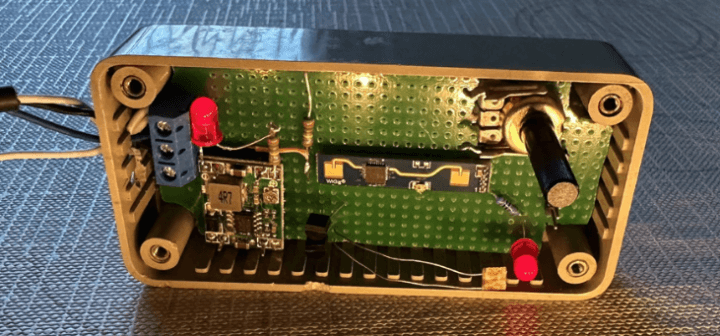
In het Elektor lab ontwierpen we een kleine print voor het project met testpunten voor het controleren van enkele belangrijke signalen. De print past in een goedkope kunststof (ABS) 1591XXA-behuizing van Hammond (figuur 3). De radar dringt goed door de behuizing heen zodat aan de voorzijde geen openingen gemaakt hoeven te worden. De behuizing ziet er zodoende heel netjes uit. Hoewel de gevoeligheid zich concentreert aan de voorkant van de antenne, kun je de achterkant afschermen met een stuk metaal(folie) om detectie aan de achterzijde te voorkomen.

De HLK-LD2410-radarmodule wordt geleverd in ten minste twee verschillende uitvoeringen (figuur 4): als een printje van 16×22 mm met een grote 5-polige pinheader (steek 0,1") en als een lange en smalle print van 7×39 mm met een kleine (steek 0,05") connector. Hoewel beide typen kunnen worden gebruikt, zijn hun connectoren niet op dezelfde manier bedraad. De signalen van het eerste type hebben de volgorde TX, RX, OUT, GND en VCC, terwijl dat bij het tweede type OUT, TX, RX, GND en VCC is. De print is ontworpen voor het eerste type, maar biedt plaats genoeg voor het tweede type. De lange en smalle module die we bestelden werd geleverd met een adapterkabel die eenvoudig op de print kan worden aangesloten. Beide typen kunnen dus zonder al te veel gedoe worden gebruikt.

Voedingsconnector K1 moet ‘naar beneden kijkend’ worden gemonteerd, wat betekent dat de voedings- en verlichtingsdraden over de print naar beneden lopen naar de tegenoverliggende, korte zijde. De twee gaten aan die kant kunnen worden gebruikt voor een trekontlasting met een kabelbinder of zoiets (zie figuur 3), maar voel je vrij als je het op een andere manier wilt doen.
Configuratie van de radar
De HLK-LD2410-module wordt gebruiksklaar geleverd, maar kan via een seriële poort geconfigureerd worden met een Windows-programma genaamd LD2410 Tooli> . Dit verklaart de aanwezigheid van connector K2, een seriële poort die wordt aangesloten op een 3,3 V FTDI-compatibele USB/serieel-adapterkabel.
De radarmodule moet natuurlijk van stroom worden voorzien voordat je hem kunt configureren en dat kan op twee manieren: via de USB/serieel-adapterkabel (JP1 gesloten) of via de voeding van de schakeling (JP1 open). In het tweede geval moet je ervoor zorgen dat de LDR geen licht ziet, anders gaat de schakeling niet aan. Gebruik P1 om het lichtniveau in te stellen waarbij de schakeling inschakelt.
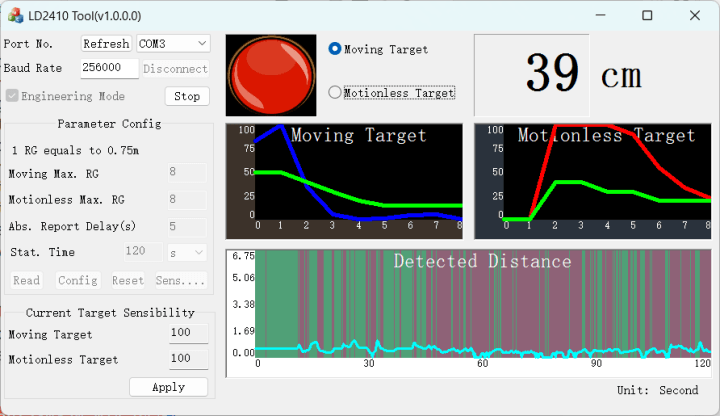
Wanneer de radarmodule ingeschakeld is, kun je hem configureren. Maak eerst verbinding met de module. De tool heeft twee hoofdmodi. Om de radar uit te lijnen, kun je het beste de Engineering Mode inschakelen en op Start klikken (figuur 5). Dit toont live-detectie in twee grafieken. Links met bewegend doel en rechts met onbeweeglijk doel. De detectieopening is verdeeld in acht ‘poorten’ van elk 75 cm. De gevoeligheid van elke poort kan worden ingesteld van 0 tot 100, waarbij 100 het minst gevoelig is (wat zoveel betekent als ‘met deze poort niet detecteren’). Als de blauwe of rode lijn de groene lijn bereikt of kruist, schakelt de uitgang naar een hoog niveau. Wanneer je tevreden bent met de gekozen gevoeligheidsinstellingen, klik je op Config om de instellingen permanent op te slaan in de sensor.
En dat is alles, je personendetector is klaar voor gebruik (figuur 6). Een ander toepassingsidee voor deze schakeling zou een rood/groen-bewegingsdetector kunnen zijn (net als in de populaire TV-serie Squid Game), waarbij een persoon op een bepaalde plek moet zijn, maar niet mag bewegen. Veel plezier!
Vragen of opmerkingen?
Hebt u technische vragen of opmerkingen naar aanleiding van dit artikel? Stuur een e-mail naar de auteur via ginodelek@gmail.com of naar de redactie van Elektor via redactie@elektor.com.
Noot van de redactie: Dit artikel (230320-03) verschijnt in Elektor van mei en juni 2024.

Discussie (0 opmerking(en))