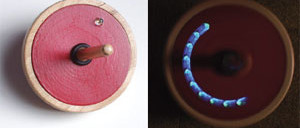
| Un giroscopio con LED de uso comercial fabricado en plástico está compuesto por uno o varios LED, recibe la alimentación de dos pilas de bot...

Elektor Team (9892)
€ 5 (GRATIS voor leden)
€ 5 (GRATIS voor leden)

| La electrónica no tiene por qué estar enmarcada siempre en la teoría ni tomarse en todo momento como algo súper serio. Esto nos lo demuestra...
€ 5 (GRATIS voor leden)
| En Internet circulan multitud de propuestas de montaje para programadores AVR sencillos que pueden utilizarse en el puerto paralelo del orde...
€ 5 (GRATIS voor leden)
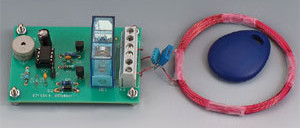
| El proyecto RFID que presentamos en este artículo utiliza un circuito integrado programado para esta aplicación, procedente de una familia d...
€ 5 (GRATIS voor leden)

| En el mundo de los helicópteros, el término “pitch” equivale al ángulo ataque (la inclinación) de las palas del rotor. Precisamente en el ca...
€ 5 (GRATIS voor leden)
| Al comprar una lámpara en unos grandes almacenes, el autor descubrió un conjunto de tres tomas de corriente accionadas por control remoto y...
€ 5 (GRATIS voor leden)
| En estos días ha vuelto a quedar claramente de manifiesto lo que Elektor ya había anunciado a voz en grito a los ingenieros electrónicos del...
€ 5 (GRATIS voor leden)
| Al conectar y desconectar el ordenador, a menudo también se deben conectar o desconectar todo tipo de periféricos (impresoras, el monitor, e...
€ 5 (GRATIS voor leden)
| Este sencillo circuito puede ser utilizado para activar cualquier cosa que deseemos, por ejemplo, conectándolo a un microcontrolador, a un r...
€ 5 (GRATIS voor leden)
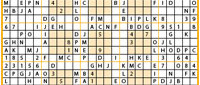
| Para el número “especial” de este año no os podíamos proponer otro tipo de “sudoku” que aquel al que normalmente no estáis acostumbrados. As...