
Gratis ‘nieuw’ artikel: BalBot – een zelfbalancerende robot
24 april 2020
op
op
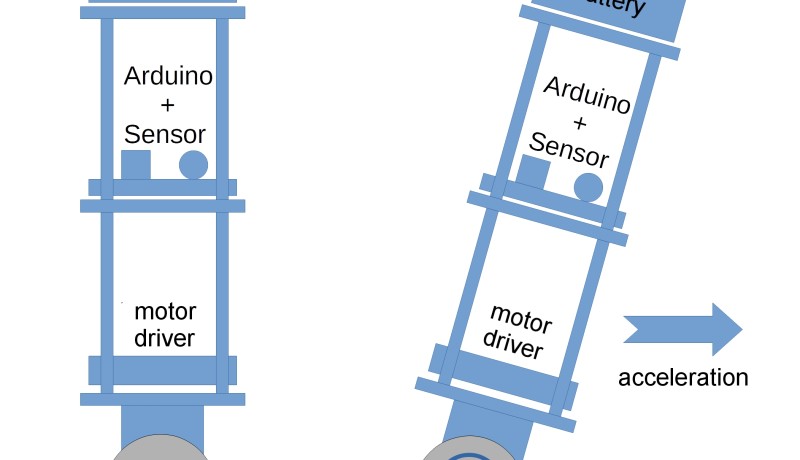
De constructie van zelfbalancerende robots kan als een eerste fase bij de ontwikkeling van androïden dienen, aangezien voortbeweging op twee (parallelle) wielen een vergelijkbare regeling vereist als rechtop lopen. In dit project wordt gebruik gemaakt van een Arduino Uno en een IC met een versnellingssensor en een gyroscoop.
U kunt het artikel hier in uw browser lezen.
U kunt het artikel hier in uw browser lezen.
Read full article
Hide full article
Discussie (0 opmerking(en))