
HyTAQ robot rijdt, vliegt en springt
op
Onderzoekers Arash Kalantari en Matthew Spenko van het Robotics Lab van het Illinois Institute of Technology (IIT) hebben een een quadrokopter ontwikkeld die niet alleen kan vliegen maar zich ook op de grond kan voortbewegen. Tijdens het over de grond bewegen heeft de robot alleen maar te maken met de rolweerstand en gebruikt op dat moment veel minder energie dan tijdens het vliegen. Hiermee hebben de onderzoekers een van de meest uitdagende problemen bij het ontwikkelen van quadrokopters opgelost: de korte tijd dat ze zich kunnen voortbewegen.
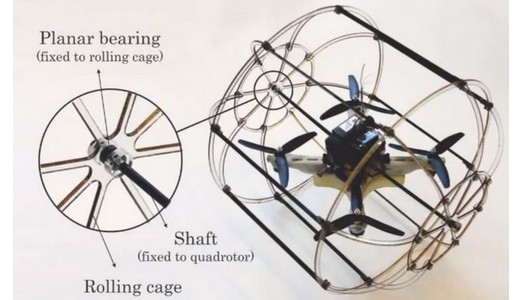
De HyTAQ (Hybrid Terrestrial and Aerial Quadrotor) wordt voortbewogen door vier propellers die voor de benodigde voortstuwing zorgen. Door de robot in een kooi te monteren kan deze zich op de grond voortbewegen waarbij dezelfde propellers en besturingselektronica voor de voortbeweging zorgen. Bij experimenten is gebleken dat de hybride robot een vier keer zo lange weg kan afleggen en zes keer langer operationeel kan blijven dan een robot die alleen maar kan vliegen. Met deze robot is ook een van de problemen van een landvoertuig opgelost: het ontwijken van obstakels. De HyTAQ vliegt er gewoon overheen.
Discussie (0 opmerking(en))