
Reconfigureerbare modulaire robot
op
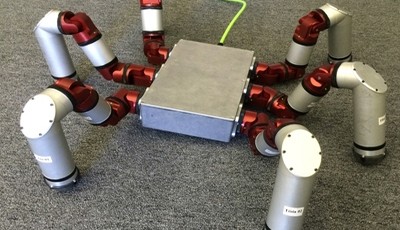
Onderzoekers van de Carnegie Mellon University zijn gestart met de ontwikkeling van een nieuw type reconfigureerbare modulaire robot. Het doel is om goedkope, robuuste en flexibele robots te maken die eenvoudig aan gebruikerseisen kunnen worden aangepast. De belangrijkste onderdelen van de nieuwe robots zijn de flexibele ledematen waarmee ze zich als een slang en ook rollend kunnen voortbewegen. Als toepassingsgebieden noemen de onderzoekers reddingsoperaties, archeologisch onderzoek en onderzoek van buizen in raffinaderijen, energiecentrales en rioolsystemen.
De eerste vertegenwoordiger van het nieuwe type is een looprobot met een rechthoekig lichaam en zes flexibele poten met een reikwijdte van 30 cm. Tijdens het lopen zijn er altijd drie poten in de lucht, twee aan een kant en een aan de andere kant. De robot weegt 8 kg. De onderzoekers zijn op dit moment bezig met de ontwikkeling van aanvullende modules zoals poten met geïntegreerde krachtsensors, wielen en rupsbanden. De communicatie tussen de verschillende modules is gebaseerd op Ethernet, waardoor de besturingscomputers niet aan een bepaald type gebonden zijn als ze maar op dezelfde manier met elkaar communiceren.
Discussie (0 opmerking(en))