
Robot met wielen die in benen kunnen veranderen
op
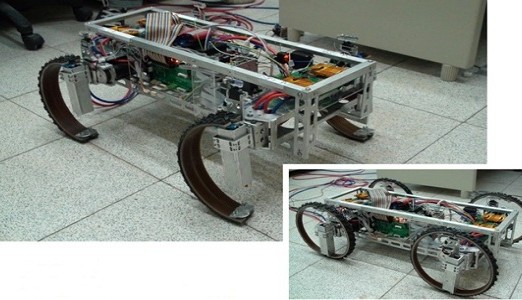
Het Bio-Inspired Robotic Laboratory (BioRoLa) van de National Taiwan University heeft een robot ontwikkeld met wielen die op commando in benen kunnen veranderen. Hiermee worden de gunstige eigenschappen van wielen voor bewegingen op vlak terrein en van benen voor bewegingen op oneffen, ruw terrein gecombineerd. Door gebruik te maken van NI LabView en CompactRIO met verschillende I/O-modules was het ontwikkelteam in staat om de elektrische, mechanische en software-elementen van het ontwerp snel in een prototype te integreren.
De meeste hybride wiel-been robots hebben aparte wielen en aparte benen, maar bij het ontwerp van het BioRoLa zijn de wielen zo gemaakt dat deze zich op commando kunnen ‘opvouwen’ tot benen. De robot wordt bestuurd door een CompactRIO systeem met een 400 MHz real-time processor en een 3M-FPGA die de interface vormt met de I/O-modules die verbonden zijn met de sensoren en actuatoren van de robot. De robot wordt bestuurd door drie rekeneenheden (pc, Real Time Operating System RTOS en FPGA) met LabView. Op verschillende niveaus worden taken uitgevoerd van hoog-niveau besturingscommando’s (‘benen’ of ‘wielen’), tot real-time-algoritmen voor de motorbesturing die in de FPGA worden uitgevoerd.
Op een van onderstaande links is een video te zien van de robot in actie.
Meer info:
http://sine.ni.com/cs/app/doc/p/id/cs-13364
Discussie (0 opmerking(en))