
Montage van de 4tronix M.A.R.S. Rover Kit
op
De M.A.R.S. Rover van 4tronix is een zelfrijdend voertuigje dat is geïnspireerd door NASA's Marsverkenners Curiosity en Perseverance, maar is dit keer ontworpen om rond te rijden op ruw terrein op aarde in plaats van op Mars. Inderdaad, in dit geval verwijst M.A.R.S. niet naar de planeet, het is namelijk een acroniem voor Mobile Autonomous Robotic System. Laten we hier eens verder naar kijken.
M.A.R.S. Rover Kit
De M.A.R.S. Rover wordt geleverd als een set met onderdelen, maar hoeft niet te worden gesoldeerd. De kit is op zichzelf staand, inclusief gereedschap, waarbij ik er de voorkeur aan geef om in plaats daarvan mijn eigen schroevendraaiers te gebruiken, die beter passen. Er zijn twee versies van de kit: één met de Raspberry Pi Zero en één met de BBC micro:bit. Ik bouw hier verder met de Raspberry Pi-versie. Merk op dat de Raspberry Pi Zero of BBC micro:bit niet zijn inbegrepen, en de vier AA-batterijen ook niet. En voor de Raspberry Pi heb je ook nog een microSD-kaart nodig.
Er is eventueel een extra toetsenbord beschikbaar op de 4tronix website, die ik zelf niet heb gebruikt. De Raspberry Pi-versie van de rover voorziet ook nog in de mogelijkheid om een Raspberry Pi-camera op het ultrasone transducermastje te monteren, maar ook daarvoor heb ik niet gekozen.
De doos met de kit is verrassend compact (18 cm × 16 cm × 8 cm) doch vrij zwaar (600 g) en tot de rand gevuld met plastic zakjes met onderdelen. Een handleiding is niét inbegrepen. Gedetailleerde montage- en programmeerinstructies zijn beschikbaar op de website van 4tronix, dus om de rover correct te assembleren heb je wel een computer met een internetverbinding nodig.
De montage instructies zijn vrij duidelijk en gedetailleerd. Het assembleren van de rover is dan ook niet moeilijk, maar er zijn wel enkele lastige handelingen zoals het vastschroeven van de motorbevestigingsbeugels zonder dat de moeren eruit vallen, danwel het bevestigen van enkele van de borgmoeren, of het aansluiten van de motoren. Let ook goed op de oriëntatie en positionering van bepaalde onderdelen, zoals de wielbasissen met de wielen en de servo's, want je kunt het gemakkelijk verkeerd doen en dan moet het overnieuw. Dit is mij ook een paar keer overkomen.
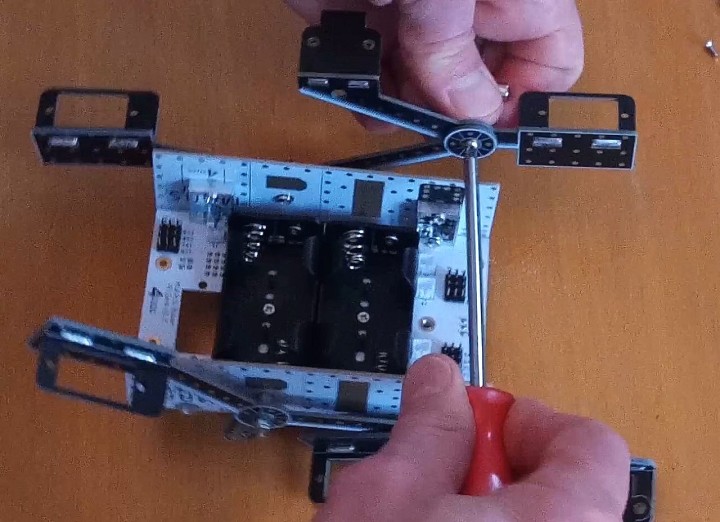
Een paar montage adviezen
Vanwege het feit dat ik een paar fouten maakte kostte het bouwen van de rover me ongeveer twee uur. Hier dus een paar tips daarbij:
- Zorg voor een paar goede schroevendraaiers.
- Er zijn drie 18 mm lange schroeven die door printplaten gaan. Zorg ervoor dat je deze goed vastdraait vóórdat je ze aan de andere kant met een borgmoer borgt. Deze kunnen anders los gaan zitten in het geval je de moer eventueel weer wat los moet draaien om de bevestigde delen makkelijker te laten roteren.
- Alle servoconnectoren zijn op dezelfde manier georiënteerd. Ze zijn duidelijk gelabeld en de servokabeltjes hebben een kleurcode. Bruin is GND, geel is SIG (signaal). Het is handig bij het later uitvoeren van het servoTest-programma om alvast het nummer van elke servo (SVx) op te schrijven.
- Het ultrasone transducermastje kan verstrikt raken in zijn eigen servokabeltjes indien deze snoertjes niet genoeg zijn weggewerkt.
- Nadat je de servo's hebt aangesloten kun je hun snoertjes rond de servobehuizingen wikkelen om een en ander een beetje op te ruimen. Maar laat wel de wielmotorkabeltjes vrij om te voorkomen dat ze de bewegingen van de tuimelarmen blokkeren.
- Het is niet echt nodig om de uitstekende uiteinden van de servobevestigingen af te knippen, de rover ziet er dan hooguit iets netter uit.
Processor & power
Na het afbouwen van de rover heb ik er een Raspberry Pi Zero 2 W op aangesloten. Ook gebruikte ik een microSD-kaart met daarop het Raspberry Pi Buster OS geïnstalleerd. Deze was eerder al in een ander project gebruikt, dus de Raspberry Pi kon reeds verbinding maken met mijn WiFi-netwerk, en ook de SSH-toegang was al ingeschakeld. Om batterijen te besparen en de software te downloaden en te installeren om de rover te laten rijden heb ik ervoor gekozen om de Raspberry Pi over USB te voeden. En, als gezegd, de instructies over hoe dit te doen zijn duidelijk en gedetailleerd maar alleen online.
Ook heb ik een Raspberry Pi Zero geprobeerd in plaats van een Zero 2 W, wat naar mijn idee op hetzelfde werkte. Het voordeel van het gebruik van een Zero 2 W is natuurlijk wel dat hij veel sneller opstart.
De Raspberry Pi drijft de rest van de rover niet aan, daar heb je dan wél de batterijen voor nodig. Dus mocht je tijdens het testen van de voorbeelden een foutmelding zien op de I²C-bus, en je weet zeker dat alles via de Raspberry Pi zou moeten werken, controleer dan de aan/uit-schakelaar en uw batterijen. Een blauwe LED geeft aan of de rover is ingeschakeld of niet.
Tijdens het rijden van de rover met het motorTest-script heb ik een stroomverbruik gemeten van ongeveer 400 tot 500 mA. Het is ongeveer 200 mA bij stationair draaien.
Programmeren van de rover
Mocht je eigen programma’s ontwikkelen en proberen voor de rover dan is het waarschijnlijk het beste om dit zoveel mogelijk te doen met de Raspberry Pi gevoed via USB. Door de rover alleen in te schakelen wanneer je de software uitprobeert bespaar je hiermee op de batterijen.
Ik heb alle voorbeelden van 4tronix geprobeerd en allen werkten zonder enig probleem. Zelf heb ik verder niets geprogrammeerd. Merk op dat om de een of andere reden het gebruik van de RGB-LED's van de rover beheerdersrechten vereist, dus elk script dat deze gebruikt moet met sudo worden uitgevoerd.
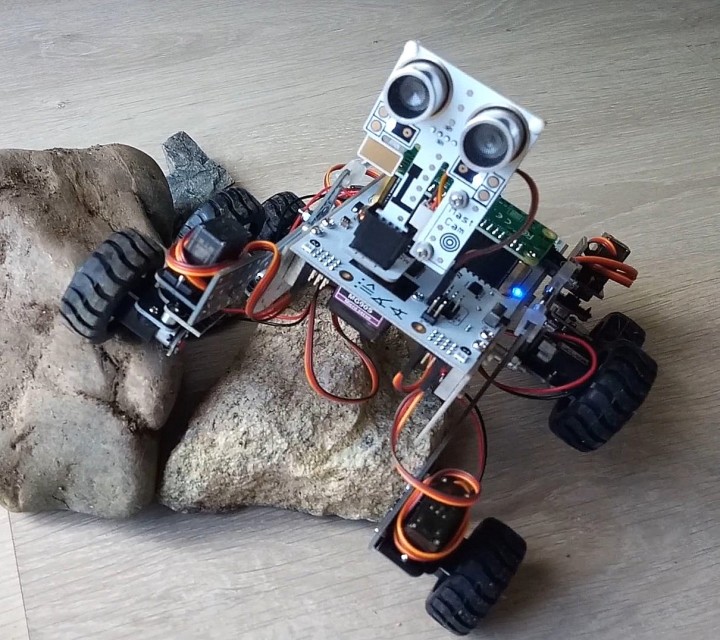
Het rijden met de rover over obstakels is behoorlijk indrukwekkend. Het gaat niet erg snel, maar de tuimelassen laten de robot over obstakels klimmen alsof ze er niet zijn.
Een rover van hoge kwaliteit
De 4tronix M.A.R.S. Rover Kit is een hoogwaardige kit die eenmaal geassembleerd er behoorlijk cool uitziet dankzij de decoratieve print en PCB-functies. Hij meet 20 cm × 18 cm × 16 cm, dus hij is een beetje groter dan de doos waarin hij wordt geleverd. Het bouwen van de robot is vrij eenvoudig want alles past perfect (wat vrij zeldzaam is) en de instructies zijn duidelijk en gedetailleerd. Het gebruik ervan is ook eenvoudig en de voorbeelden en testprogramma's kunnen zonder problemen worden geïnstalleerd en uitgevoerd.
Eenmaal geassembleerd en van software voorzien is de rover klaar om rond te rijden en is dan bijna niet meer te stoppen. Enige programmeerkennis is natuurlijk wel vereist, maar daarom heb je de kit ook aangeschaft, nietwaar?
Uitbreiding van de kit
De hoofdprint heeft vier extra montagegaten die kunnen worden gebruikt om uitbreidingen te bevestigen.
Ook zijn er nog veel aansluitingen over ten behoeve van het toevoegen van meer servo's (overigens, het zakje reserveonderdelen in mijn kit bevatte een extra servo). Ik heb geen aansluitschema gevonden dus ik weet niet of de servoconnectoren voor iets anders kunnen worden gebruikt.
Daarnaast zijn er nog twee I²C uitbreidingsslots beschikbaar waarop je bijvoorbeeld sensoren kunt aansluiten.
Vertaling: Marc Gauw
Discussie (0 opmerking(en))