
Review: Smart Video Car Kit met een Raspberry Pi
Verbeteren van de stuurinrichting
Het testen begint met het kalibreren van de servo’s en hier werd ik met een serieus probleem geconfronteerd: het sturen van de auto werkte niet. De stuurservo zoemde, maar er gebeurde niets. Na wat zoeken, ontdekte ik dat het probleem zat in de twee koperen afstandsbusjes naast de voorwielen. Die zijn precies even lang als de dikte van de onderdelen van acrylglas die ik eerder in de voorwielen had gemonteerd. Als de schroeven te vast worden aangedraaid, komen de wielen klem te zitten. Ik heb dat opgelost door ringen van 0,5 mm dik toe te voegen aan beide uiteinden van de stangetjes (in totaal vier ringen dus). Na die verbetering konden de voorwielen vrij bewegen en werkte het sturen zoals het hoort.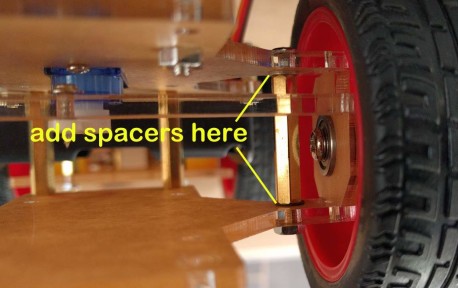
m de stuurinrichting te verbeteren.
Als de kalibratie klaar is, druk dan op ‘Confirm’ om de offset-waarden op te slaan op de RPi.
Dat is alles. De handleiding zegt: Get on the road! Bij mij werkte alles meteen, dus daar hoef ik niet over uit te wijden.
Android-app
In de GitHub repository is de broncode voor een experimentele Android-app te vinden. Deze moet worden gecompileerd met App Inventor. In de Google Play Store is een gecompileerde app te vinden (zoek naar Sunfounder). Om die te gebruiken op de RPi moet u eerst ‘pip’ en dan ‘Django’ installeren. Instructies zijn te vinden op GitHub (ze schrijven over een http_server, maar ze bedoelen een html_server). Helaas werkte de app niet op mijn telefoon (Nexus 5X met Android 8.1.0).Conclusie
De Sunfounder Smart Video Car Kit for Raspberry Pi is een goed product. De onderdelen passen perfect, de handleiding is uitstekend en de software werkt. Natuurlijk zijn er wel wat kleine probleempjes, maar er is niets aan de hand dat niet gemakkelijk is op te lossen. Er worden voldoende bouten en moeren meegeleverd, zodat u niet meteen in de problemen komt als er één of twee zoek raken. Er wordt ook materiaal meegeleverd om de bedrading netjes af te werken.
Als ik het opnieuw zou moeten doen, zou ik de kit in deze volgorde opbouwen:
- Installeer de hostsoftware voor de afstandsbediening op de PC;
- bereid de RPi voor met alle nodige software;
- test de camera;
- test de complete elektrische schakeling voordat u die vastmaakt in de auto, zodat u weet dat alles werkt;
- zet de auto in elkaar (leid de servokabels onder de RPi door en houd daarbij voldoende ruimte over voor de beweging van de pan- en tilt-servo’s);
- test de auto.
Energieverbruik
Omdat de gebruiker zelf moet zorgen voor de li-ion-accu’s, heb ik wat verbruiksmetingen gedaan:- Motoren draaien op volle snelheid, geen camera geïnstalleerd: 600 mA bij 7 V
- Motoren draaien op volle snelheid, met camera: 700 mA bij 7 V
- Stilstaan met camera: 450 mA bij 7 V
Read full article
Hide full article
Discussie (0 opmerking(en))