
Software-Defined Vehicles: sensorfusie en EE-Architectuur uitgelegd
op
Moderne voertuigelektronica verschuift van geïsoleerde, enkelvoudige ECU’s naar softwaregedefinieerde voertuigarchitecturen waarbij sensordata wordt gedeeld door het hele voertuig. Deze verschuiving wordt veroorzaakt door de hoeveelheid en complexiteit van data van camera’s, radar en LiDAR, en ook door de noodzaak voor betrouwbare waarneming bij ADAS en autonome rijfuncties. In de onderstaande video zie je hoe sensorfusie in de praktijk werkt en hoe EE-architecturen zich ontwikkelen om aan deze nieuwe eisen te voldoen.
Video: softwaregedefinieerde voertuigen met sensorfusie en EE-architectuur
Van enkelvoudige ECU’s naar centrale rekenkracht
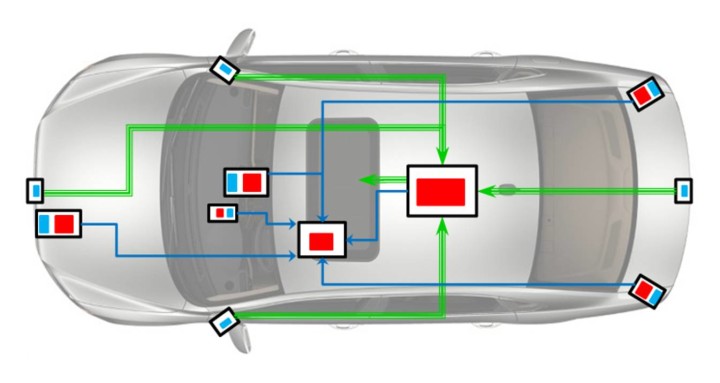
Eerdere systemen gebruikten losse ECU’s voor specifieke functies, elk verbonden met een kleine sensor die weinig data opleverde. Moderne voertuigen gebruiken hogeresolutiesensoren die meerdere systemen tegelijk moeten voorzien. Dit vraagt om meer bandbreedte en flexibelere communicatienetwerken.
Waarom sensorfusie nodig is
Elke sensortype heeft sterke en zwakke punten. Radar geeft een nauwkeurige afstand maar een slechte hoekresolutie. Camera’s bieden veel visueel detail, maar minder diepte-informatie. LiDAR voegt geometrische precisie toe, maar zorgt voor veel data. Fusie-algoritmes combineren deze sterke punten om de nauwkeurigheid van detectie te verbeteren, ruis te verminderen en valse alarmen te voorkomen.
Plaatsing van rekenkracht
Een deel van de voorbewerking gebeurt al in de sensoren zelf, maar naarmate het automatiseringsniveau stijgt, verschuift meer rekenwerk naar domeincontrollers of centrale krachtige rekenunits. Waar die fusie precies plaatsvindt hangt af van het ontwerp, het datavolume, de rekenbelasting en de systeemtiming.
Uitvoer en weergave van data
Sensorfusiesoftware kan afhankelijk van de behoefte van de rijfunctie objectlijsten of meer gedetailleerde grid-/celweergaven opleveren. Hogere automatisering vraagt meestal om meer gedetailleerde, lagere representaties die meer details van de omgeving behouden.
Veiligheid en softwareborging
Omdat deze systemen de voertuigbesturing beïnvloeden, wordt de ontwikkeling uitgevoerd volgens automotive veiligheidsnormen zoals ISO 26262. Testen gebeurt zowel met simulaties als echte rijdata om randgevallen te vinden die niet kunstmatig betrouwbaar kunnen worden opgewekt.
Waarom dit belangrijk is
Softwaregedefinieerde architecturen zorgen voor betere waarneming met minder overbodige sensoren en maken het mogelijk om functies te verbeteren met software-updates. Deze flexibiliteit is essentieel voor de verdere ontwikkeling van ADAS en autonome systemen.

Discussie (0 opmerking(en))