
Multitasking met de Raspberry Pi
op
Multitasking is een hot topic op het gebied van microcontrollersystemen, en dan vooral in automatiseringstoepassingen. Naarmate de complexiteit van projecten toeneemt, wordt er meer functionaliteit van gevraagd; bij dergelijke projecten worden verschillende onderling gerelateerde taken gebruikt die op hetzelfde systeem worden uitgevoerd en die de CPU (of meerdere CPU’s) delen om de vereiste bewerkingen te implementeren. Als gevolg hiervan is het belang van multitasking in microcontroller-gebaseerde toepassingen de afgelopen jaren gestaag toegenomen. Veel complexe automatiseringsprojecten maken tegenwoordig gebruik van een of andere multitasking-kernel. In het boek wordt de programmeertaal Python 3 gebruikt op de Raspberry Pi 4. Andere modellen van Raspberry Pi zijn eveneens bruikbaar zonder dat de code hoeft te worden aangepast.
Het boek is projectgeoriënteerd. Het belangrijkste doel is om de beginselen van multitasking te leren met Python op Raspberry Pi. In het boek worden veel compleet geteste projecten beschreven die gebuik maken van de multitasking-modules van Python. Elk project wordt in detail beschreven en besproken. Van elk project worden ook de volledige programmalistings verstrekt. Lezers kunnen de projecten gebruiken zoals ze worden beschreven, maar ze ook aanpassen aan hun eigen behoeften.
Voorbeeld: een verkeerslichtcontroller
In dit project ontwerpen we voor gebruik op een kruispunt een eenvoudige verkeerslichtcontroller. Het betreft de kruising van East Street en North Street. Aan vier zijden van de kruising zijn verkeerslichten. North Street heeft twee oversteekplaatsen voor voetgangers, die met drukknoppen worden bediend. Na indrukken worden alle lichten aan het einde van hun cyclus rood. Dan klinkt er een zoemer om aan te geven dat de voetgangers veilig kunnen oversteken. Ook is er een LCD aangesloten op het systeem waarop te zien is welke cyclus (voetgangers of verkeer) draait. Figuur 9.12 toont de de plaatsing van de verkeerslichten op de kruising.
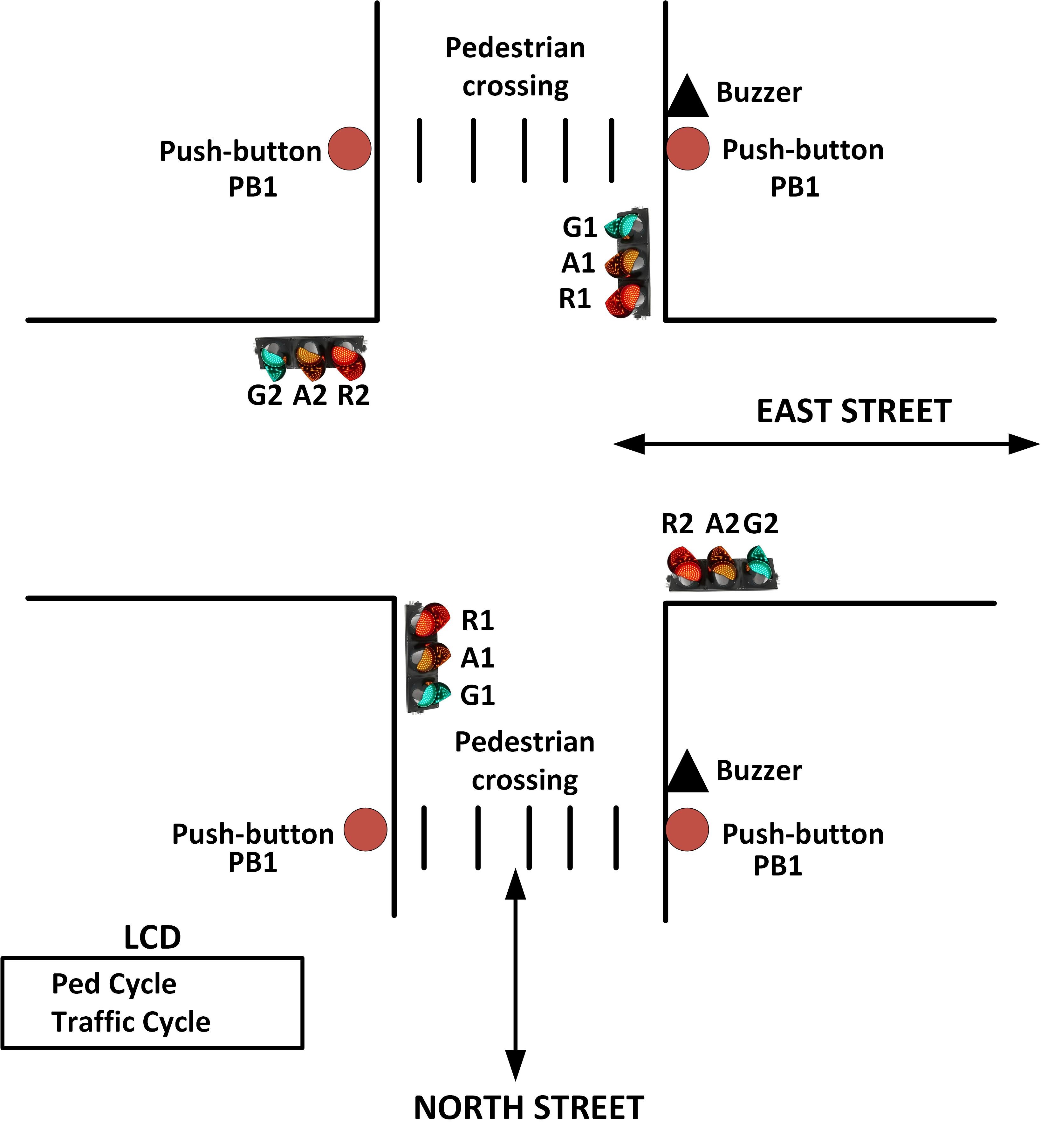
In dit project heeft elke verkeerslichtkleur een vaste duur; ook de oversteektijd voor voetgangers (zoemer) ligt vast. Voor het gemak nemen we aan dat beide wegen van de kruising dezelfde timing hebben:
- rood: 19 seconden
- oranje: 2 seconden
- groen: 15 seconden
- oranje + rood: 2 seconden
- oversteektijd voetgangers: 10 seconden
De totale cyclustijd van de verschillende lichten in dit voorbeeldproject bedraagt zodoende 38 seconden.
De volgorde van de verschillende lichten is hier als volgt (dat kan overigens van land tot land verschillen):
- rood – oranje+rood – groen – oranje – ...
- groen – oranje – rood – oranje+rood – ...
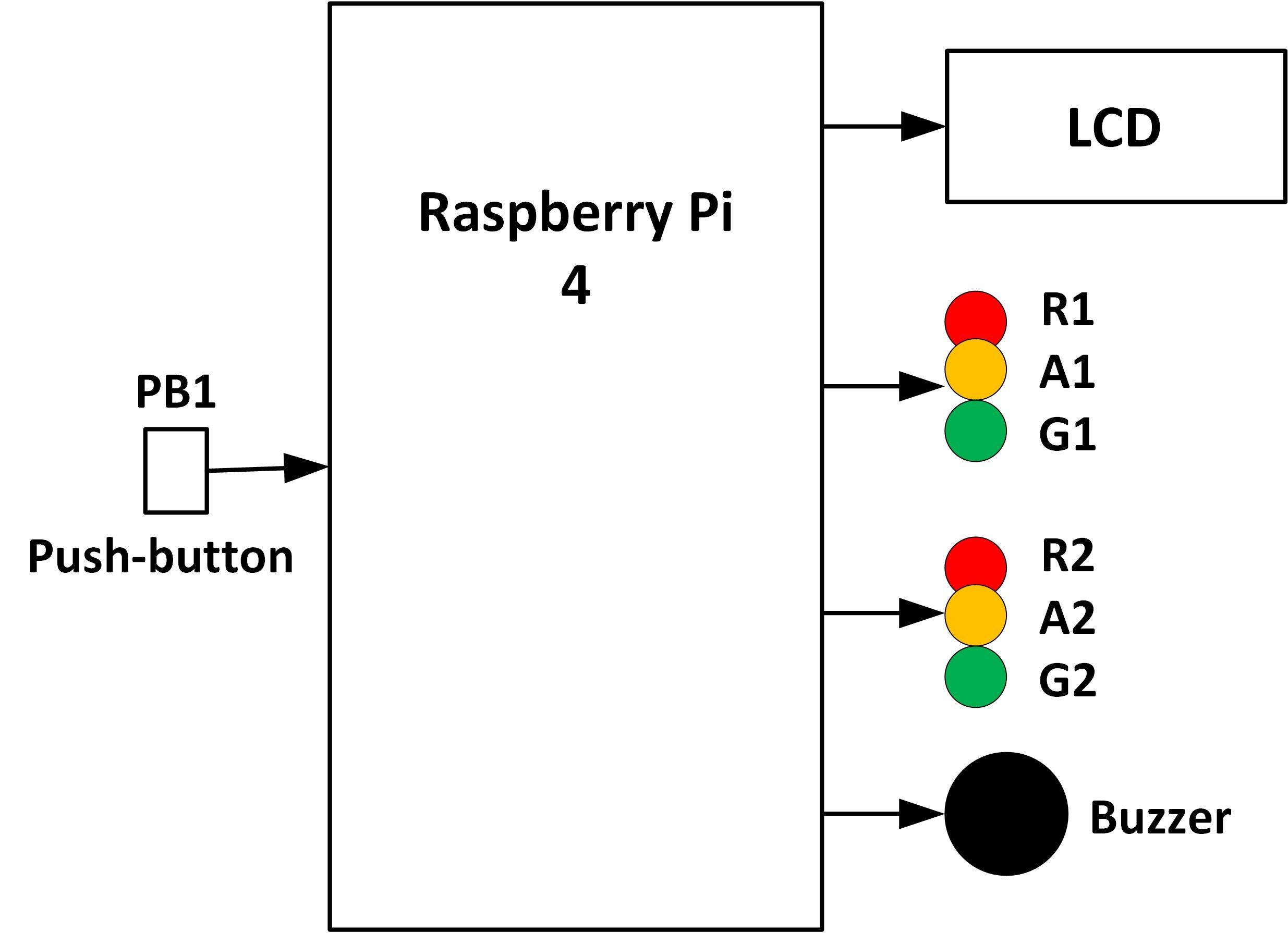
Figuur 9.13 toont het blokschema van het project.
Het schema van de verkeerslichtcontroller is te zien in figuur 9.14. In dit project gebruiken we rode (R), oranje (A, staat voor amber) en groene (G) LED’s die de echte verkeerslichten simuleren.
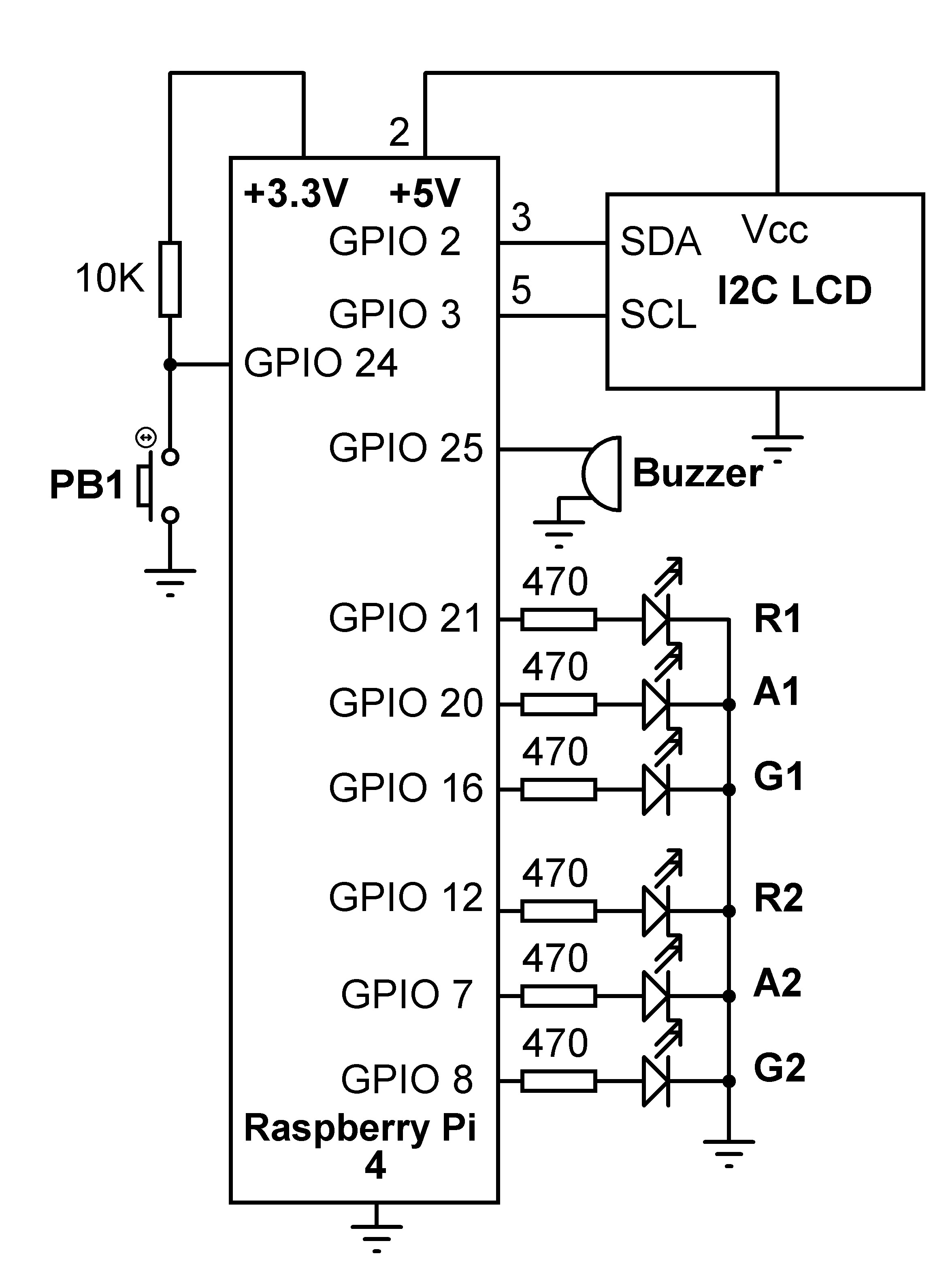
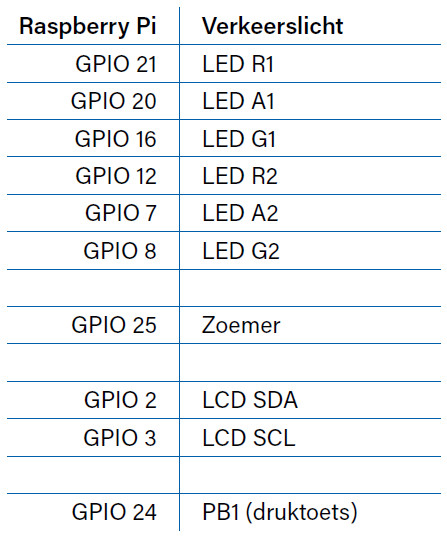
De volgende verbindingen moeten tussen de Raspberry Pi en verkeerslichten worden gemaakt:
Figuur 9.15 geeft de volledige programmalisting (programmanaam: traffic.py; download hieronder). Aan het begin van het programma worden de modules RPi, time, I2C LCD driver en multiprocessing geïmporteerd in het programma en worden de twee wachtrijen pedq en lcdq aangemaakt.
#--------------------------------------------------------------------
# TRAFFIC LIGHTS CONTROLLER
# =========================
#
# This is a traffic lights controller project controlling lights
# at a junction. 6 LEDS are used to represent the traffic lights.
# Additionally a button is used for pedestrian crossing, and an
# LCD shows the state of the traffic lights at any time
#
# Author: Dogan Ibrahim
# File : traffic.py
# Date : May 2020
#----------------------------------------------------------------------
import RPi.GPIO as GPIO # Import RPi
import multiprocessing # Import multiprocessing
import time # Import time
import RPi_I2C_driver # I2C library
LCD = RPi_I2C_driver.lcd() # Import LCD
GPIO.setwarnings(False)
GPIO.setmode(GPIO.BCM) # GPIO mode BCM
pedq = multiprocessing.Queue() # Create queue
lcdq = multiprocessing.Queue() # Create queue
#
# This function sends data 'state (0 or 1)' to specified port
#
def ONOF(port, state):
GPIO.output(port, state)
#
# This function configures the specified port as output
#
def CONF_OUT(port):
GPIO.setup(port, GPIO.OUT)
#
# Process to control the lights
#
def Lights(): # Process Lights
R1=21; A1=20; G1=16 # LED connections
R2=12; A2=7; G2=8 # LED conenctions
Buzzer=25 # Buzzer connection
CONF_OUT(R1); CONF_OUT(A1); CONF_OUT(G1) # Configure
CONF_OUT(R2); CONF_OUT(A2); CONF_OUT(G2) # Configure
CONF_OUT(Buzzer) # Configure
ONOF(R1,0); ONOF(A1,0); ONOF(G1,0); ONOF(R2,0); ONOF(A2,0); ONOF(G2,0)
ONOF(Buzzer, 0)
RedDuration = 15
GreenDuration = 15
AmberDuration = 2
#
# Control the traffic light sequence
#
while True: # Do forever
ONOF(R1,0); ONOF(A1,0); ONOF(G1,1); ONOF(R2,1); ONOF(A2,0); ONOF(G2,0)
time.sleep(RedDuration)
ONOF(G1,0); ONOF(A1,1)
time.sleep(AmberDuration)
ONOF(A1,0); ONOF(R1,1); ONOF(A2,1)
time.sleep(AmberDuration)
ONOF(A2,0); ONOF(R2,0); ONOF(G2,1)
time.sleep(GreenDuration)
ONOF(G2,0); ONOF(A2,1)
time.sleep(AmberDuration)
ONOF(A2,0); ONOF(A1,1); ONOF(R2,1)
time.sleep(AmberDuration)
while not pedq.empty(): # If ped request
lcdq.put(1)
ONOF(G1,0); ONOF(R1,1); ONOF(A1,0) # Only RED ON
ONOF(G2,0); ONOF(R2,1); ONOF(A2,0) # Only RED ON
d = pedq.get() # Clear ledq
ONOF(Buzzer, 1) # Buzzer ON
time.sleep(10) # Wait 10 secs
ONOF(Buzzer, 0) # Buzzer OFF
d = lcdq.get() # Clear lcdq
def Pedestrian(): # Process Pedestrian
PB1 = 24
GPIO.setup(PB1, GPIO.IN) # PB1 is input
while True: # Do forever
while GPIO.input(PB1) == 1: # PB1 not pressed
pass
pedq.put(1) # Send to Ped queue
while GPIO.input(PB1) == 0: # PB1 not released
pass
#
# Create the processes
#
p = multiprocessing.Process(target = Lights, args = ())
q = multiprocessing.Process(target = Pedestrian, args = ())
p.start()
q.start()
#
# LCD Display control. Display 'Ped Cycle' or 'Traffic Cycle'
#
LCD.lcd_clear() # Clear LCD
LCD.lcd_display_string("TRAFFIC CONTROL", 1) # Heading
while True: # DO forever
if not lcdq.empty():
LCD.lcd_display_string("Ped Cycle ", 2)
else:
LCD.lcd_display_string("Traffic Cycle", 2)
time.sleep(1)
In het programma zijn twee functies gedefinieerd met de namen ONOF en CONF_OUT. De functie ONOF heeft twee argumenten: port en state. Deze functie stuurt de status (0 of 1) naar de opgegeven GPIO-poort. De functie CONF_OUT heeft één parameter: port. Deze functie configureert de betreffende GPIO-poort als uitgang.
Het programma is twee processen rijk: Lights en Pedestrian. Aan het begin van het proces Lights worden de verbindingen tussen de Raspberry Pi en de LED’s (verkeerslichten) en de zoemer gedefinieerd en de betreffende poorten worden als uitgang geconfigureerd. Bovendien worden al deze poortuitgangen op 0 gezet, zodat alle LED’ s en de zoemer UIT zijn. De LED’s worden dan in de juiste volgorde ent met de juiste timing geactiveerd. Aan het einde van de functie wordt gecontroleerd of de voetgangersknop is ingedrukt. De voetgangersknop is ingedrukt als de wachtrij pedq niet leeg is. Tijdens de voetgangerscyclus gaan de rode lichten voor beide straten AAN om het verkeer te stoppen zodat de voetgangers veilig kunnen oversteken.
Ook wordt de zoemer tijdens de voetgangerscyclus gedurende 10 seconden geactiveerd om aan te geven dat veilig kan worden overgestoken.
Het voetgangersproces houdt continu drukknop PB1 in de gaten. Als de knop wordt ingedrukt, wordt er een 1 naar de wachtrij pedq gestuurd, zodat het Lights-proces dit gemakkelijk kan controleren en de voetgangerscyclus kan starten.
Het hoofdprogramma stuurt ook het LCD aan. Bij het starten van het programma wordt het bericht ‘TRAFFIC CONTROL’ op de eerste regel van het display getoond. Voor de tweede regel wordt continu de wachtrij lcdq gecontroleerd en ofwel ‘Ped Cycle’ (voetgangers) ofwel ‘Traffic Cycle’ (verkeer) getoond (zie figuur 9.16).

(200381-04)
----------------------------------------------------------------------------------------------------------------------
Wilt u meer van die fantastische Elektor-artikelen?
--> Neem vandaag nog een abonnement op Elektor - u mist nooit meer een artikel, project of handleiding!
----------------------------------------------------------------------------------------------------------------------
Discussie (0 opmerking(en))