
Pi-weefgetouw (Nuttige Toepassingen voor de Raspberry Pi, deel 1)
29 november 2016
op
op
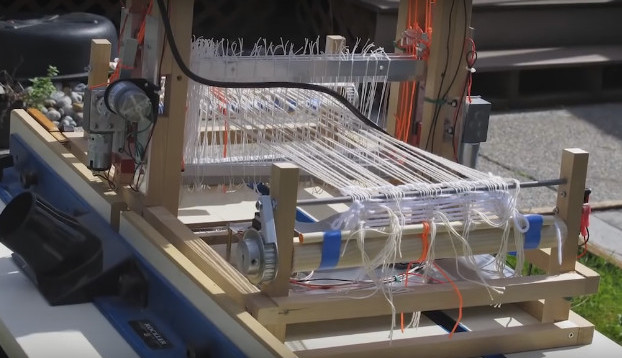
Toen Fred Hoefler geïrriteerd was over een computerbestuurd weefgetouw dat er wel leuk uitzag maar waarvan de Java-software niet met een MacBook Pro met OS-X wilde samenwerken, maakte zijn vrouw Gina de opmerking: “Dan bouw je toch een computerbestuurd weefgetouw met een van die Raspberry-Pi-dingen van je?” Of dit als een idee, een verwijt of een opdracht was bedoeld zullen we nooit weten, maar Fred gaf er gehoor aan en begon technisch te knutselen met:
Fred probeerde de Cossen-motor met een H-brug aan te drijven, maar dat kreeg hij met de RPi niet voor elkaar. Uiteindelijk kostte het gehele project hem ongeveer $150.
Het weefgetouw wordt met een eenvoudig Pythonscript bestuurd. Aangezien de meeste stuurprogramma’s voor weefgetouwen hun gegevens halen uit een simpel ASCII .wif-bestand, zou het eenvoudig moeten zijn om het Python-programma voor zo’n besturingsbestand aan te passen. De broncode is hier te vinden. Fred nodigt op zijn webpagina voor het RPi-weefgetouw-project alle programmeurs uit om deze code te gebruiken en naar wens aan te passen. Uiteraard onder strikte open-source-voorwaarden.
- Een Cossen-motor met 30 rpm en 120 N/cm torque. Deze motor zou in principe meer dan 6 kg moeten kunnen tillen (63,2 N/9,80665 N =~6,4 kg). Wat betreft snelheid: 1,9 cm x 2pi x 30 rpm = 358 cm/min.
- Weeframen die via een reeks katrollen en actuator-armen worden ‘opgetild’;
- Een motorbesturingseenheid met 12V-relais en TIP120 darlington-transistors;
- Motor-aansturing via tijdgestuurde eindschakelaars om de bewegingen te stoppen;
- Eis nr. 1: geen enkel onderdeel van het weefgetouw mag meer kosten dan $35 (oftewel de prijs van de RPi);
- Eis nr. 2: toetsenbord en monitor rechtstreeks aangesloten op de Pi, of indirect via een wi-fi SSH-verbinding en een standaard terminalprogramma op een pc of Mac.
Fred probeerde de Cossen-motor met een H-brug aan te drijven, maar dat kreeg hij met de RPi niet voor elkaar. Uiteindelijk kostte het gehele project hem ongeveer $150.
Het weefgetouw wordt met een eenvoudig Pythonscript bestuurd. Aangezien de meeste stuurprogramma’s voor weefgetouwen hun gegevens halen uit een simpel ASCII .wif-bestand, zou het eenvoudig moeten zijn om het Python-programma voor zo’n besturingsbestand aan te passen. De broncode is hier te vinden. Fred nodigt op zijn webpagina voor het RPi-weefgetouw-project alle programmeurs uit om deze code te gebruiken en naar wens aan te passen. Uiteraard onder strikte open-source-voorwaarden.
Showtime!
(er is geen geluid bij deze video’s, het ligt dus niet aan uw pc)Read full article
Hide full article
Discussie (0 opmerking(en))