
Niet voor mietjes - Makerfabs 6 DOF Robot Arm Kit met de Raspberry Pi Pico
op

Wat is het?
De 6 DOF Robot Arm met de Raspberry Pi Pico is een robotarm bestuurd door een Raspberry Pi Pico microcontroller board. DOF is de afkorting van Degree(s) of Freedom, wat in het geval van een robotarm betrekking heeft op de articulatie. De arm die hier wordt beschreven heeft er zes, waardoor deze op zes verschillende plaatsen onafhankelijk van de anderen kan bewegen. Elke DOF betekent een eigen servo.
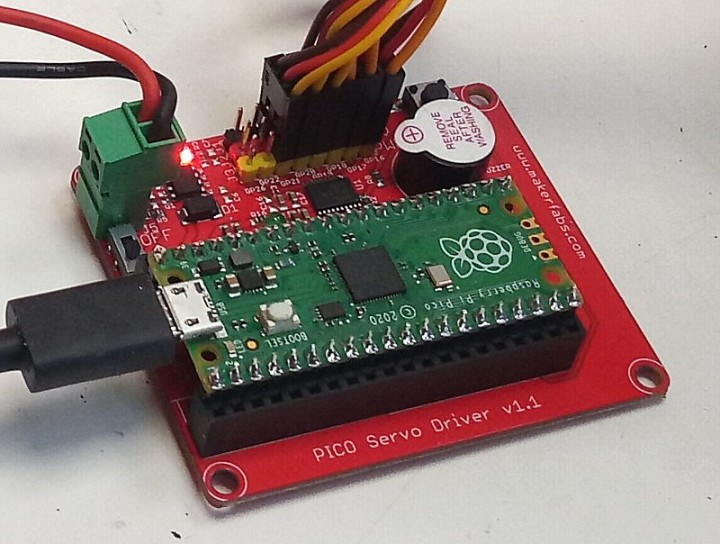
De arm wordt bestuurd door een Raspberry Pi Pico gemonteerd op een klein uitbreidingsprintje die zorgt voor de verbindingen met de servo's, de voeding, een zoemer en een drukknop. De Pico, of beter gezegd de RP2040 MCU erop, is ontworpen om in MicroPython te worden geprogrammeerd, maar dit is natuurlijk niet verplicht. De driver en de voorbeelden zijn hier echter wel in MicroPython geschreven.
Alles is inbegrepen
De robotarm wordt geleverd als een op zichzelf staande set onderdelen. Behalve een computer om de programmering op te doen en een micro-USB kabel is er verder niets anders nodig. Een 5 VDC, 6 A voeding is inbegrepen. Een voedingskabel is ook inbegrepen, maar met een Amerikaanse stekker. Dus afhankelijk van waar u woont moet u deze mogelijk vervangen of een verloopstekker toevoegen (zoals ik deed). Er zit zelfs een kleine schroevendraaier bij, maar ik gebruikte voor het monteren van de arm liever mijn eigen gereedschap.

De kit heeft nogal wat onderdelen en nog meer bouten en moeren, maar niet alles worden gebruikt. Met uitzondering van de acrylbasisplaat en de stalen armstang zijn alle onderdelen gemaakt van aluminium. Indien u hem goed in elkaar zet krijgt u geen wiebelig plastic speeltje, maar een sterke, solide metalen arm. Ondanks dat alles van aluminium is weegt de geassembleerde arm 1,3 kg (zonder de voeding).
Leerzaam hulpmiddel
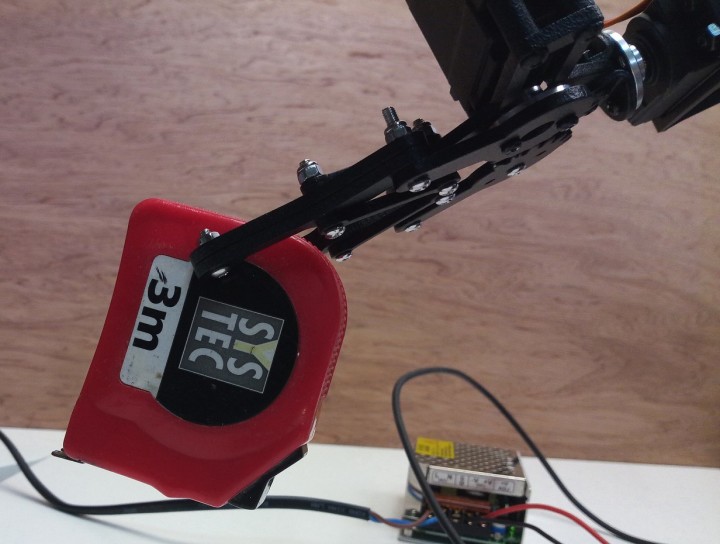
De 6 DOF-robotarm is vooral een leerzaam hulpmiddel om te leren programmeren in MicroPython. Het is een grappig apparaat dat op vele manieren kan bewegen, en hij kan kleine voorwerpen zoals de eigen voeding oppakken (ca. 6 cm × 4 cm × 8,5 cm). Zoals te zien op een demovideo kunt u hem bijvoorbeeld gebruiken om het Tower of Hanoi spel te spelen. Hij is niet geschikt voor industriële toepassingen of zeer nauwkeurige taken. De arm heeft wel grip, maar ik zou hem met een voorwerp erin toch niet vertrouwen.
Wat u eerst nog zou willen weten
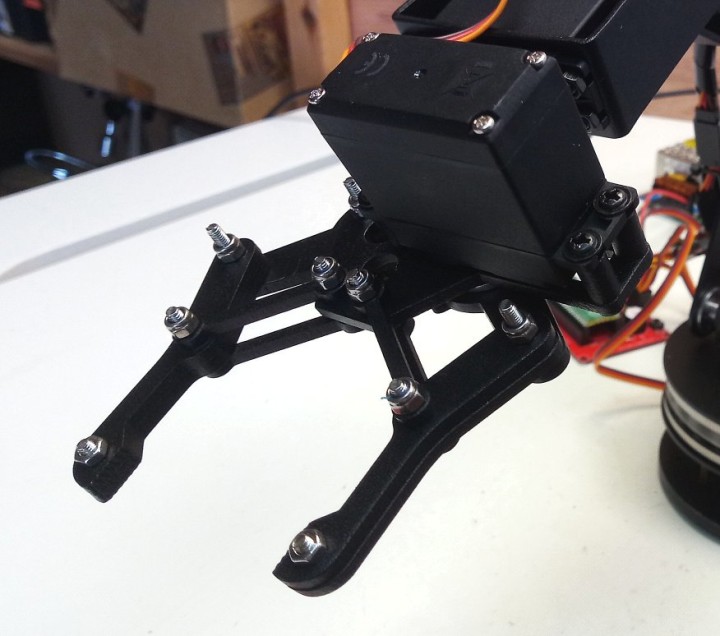
Het monteren van de robotarm is niet voor mietjes. De handleiding (niet inbegrepen, aan u om deze te vinden) is alleen in het Chinees en bovendien onduidelijk en onvolledig. Er is ook een korte montage animatievideo, maar deze is ook onvolledig. Toch kan het met een beetje geduld en gezond verstand wel lukken omdat het geen erg ingewikkeld ontwerp is. Het enige complexe onderdeel, de grip, is al voorgemonteerd. Er zijn echter wel een paar zaken die u tevoren moet weten (en waar ik met vallen en opstaan achter ben gekomen):
- Wees erop voorbereid om onderdelen uit elkaar te halen zodat u ze weer op de juiste manier in elkaar kunt zetten. Twee keer bouwen geeft waarschijnlijk de beste resultaten.
- Begin onderaan, ofwel bij de bodemplaat met het roterende platform, en bouw van daaruit omhoog.
- Het grote lager van de roterende basis bestaat uit drie delen. Ik merkte een klein verschil in spinkwaliteit tussen de twee mogelijke configuraties, maar uiteindelijk blijkt dat er helemaal niets toe te doen omdat de basis voornamelijk als een dood gewicht functioneert.
- Gebruik eerst de twee rode YF-6125MG servo's. Mijn kit bevatte er drie (één reserve), maar de handleiding en video gebruiken deze overal. Deze servo's zijn het sterkste en kunnen het meeste gewicht dragen en moeten daarom op het onderste deel van de arm worden gemonteerd.
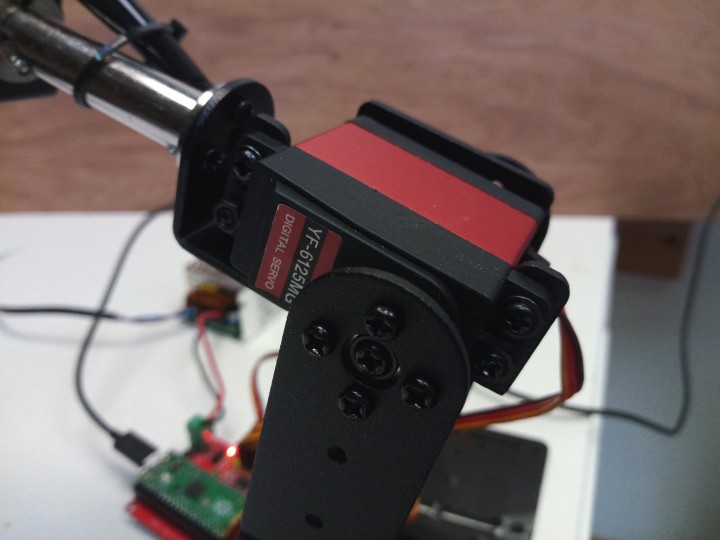
- Zorg ervoor dat alle servo's zich in hun middenpositie bevinden voordat u ze monteert. Voor de zwarte MG 996R servo's kunt u dit handmatig/visueel doen met een soort servo aanwijzer/arm (meegeleverd in de kit). De rode YF-6125MG servo's hebben echter geen eindstops, zodat u niet kunt zien wanneer ze in hun middelste positie staan. Ik heb daarom de Pico gebruikt voor het on-the-fly op nul zetten van de servo's, ofwel tijdens het monteren van de arm. Dit klinkt misschien ingewikkeld, maar is eigenlijk best eenvoudig. Ik zou zelfs willen adviseren om de assemblage te starten met het instellen van de MicroPython ontwikkelomgeving en te proberen eerst de demo's uit te voeren met nog niet gemonteerde servo's. Als u eenmaal begrijpt hoe u de servo’s via MicroPython bestuurt kunt u ze op nul zetten en op de arm monteren.
- Bij alle montagestappen wordt de servo als laatste gemonteerd. Deze dienen over het algemeen te worden bevestigd met de schroeven met de pakking (het type Mexicaans hoedje).
- Zorg ervoor dat u alles goed aanspant, want het is moeilijk om dit te doen nadat de arm is gemonteerd.
- De grip is voorgemonteerd, maar wiebelig en dus had ik de zelfsluitende moeren een beetje aangedraaid. Het resultaat was dat de servo die de grip bestuurde uitbrandde, omdat de grip blijkbaar te strak was geworden om te bewegen (ondanks dat ik hem wel handmatig kon verplaatsen). Gelukkig bevat de kit twee reserve servo's.
- Er is geen bedradingsschema, er zijn zes servo's en de servo-aansluitkop heeft acht posities. Gelukkig is het kleurgecodeerd dus is het eenvoudig om de polariteit goed te krijgen. Sluit de servo’s aan vanaf de onderkant. De laagste servo (de roterende basis, '0' of 'A' in de software) maakt verbinding met GPIO16, de hoogste (de grip, '5' of 'F' in de software) gaat op GPIO21. De software maakt het mogelijk om de GPIO-pinnen opnieuw toe te wijzen en ook de draairichting van elke servo kan worden gedefinieerd, dus u heeft hier enige vrijheid om zaken te corrigeren.
- De bodemplaat heeft veel gaten, maar niet voor het bevestigen van het Pico printje of de voeding.
- Zorg ervoor dat de voeding 5 V levert voordat u deze op de arm aansluit. De uitgangsspanning kan worden aangepast van ongeveer 4,5 V tot 6,5 V.
Wees voorzichtig!
Monteer niet de robotarm en voer niet de demo zomaar uit zonder eerst elke servo te hebben getest. De arm kan ronddraaien en wild bewegen, spullen van uw tafelblad vegen of u in het gezicht raken. De servo's zijn krachtig! Ik slaagde erin om de arm zijn eigen 4 mm dikke basisplaat te doen knappen doordat een servo tegen het tafelblad naar beneden bewoog in plaats van omhoog. Vooral de rode YF-6125MG servo's bewegen behoorlijk snel, dus pas op. Ik raad daarom ten zeerste aan om de arm aan het tafelblad te klemmen, of aan een zware plaat, en de ruimte eromheen vrij te houden.

Let ook op dat de rode YF-6125MG servo's geen eindstops hebben en de verkeerde kant op kunnen gaan om hun doelpositie te bereiken. Dit kan gebeuren wanneer de arm wordt neergeklapt en vervolgens wordt ingeschakeld. Ik raad daarom ook ten zeerste aan om de arm rechtop te strekken voordat u de stroom inschakelt.
Niet voor mietjes
De 6 DOF Robot Arm met Raspberry Pi Pico van Makerfabs is geen kit voor mietjes. Het op de juiste manier in elkaar zetten vergt geduld en doorzettingsvermogen. Hoewel de arm vrij eenvoudig is te gebruiken, dankzij de driver en demo geschreven in MicroPython, dient hij stap voor stap te worden ingesteld om ongelukken te voorkomen. De servo's zijn snel en sterk en de arm is 44 cm lang wanneer hij volledig is gestrekt (50 cm inclusief de roterende basis). Het vastschroeven aan het tafelblad in het midden van een vierkante meter aan vrije ruimte wordt ten zeerste aanbevolen. U wilt toch niet dat hij uw laptop kapotslaat of uw koffiemok van tafel veegt?

Discussie (0 opmerking(en))