
Een kleine inductiemeter
op
Philippe Le Guen (Frankrijk)
Een goed instrument om spoelen te testen en te meten staat al vele jaren op mijn verlanglijstje voor laboratoriumapparatuur, maar zo’n apparaat was me domweg te duur. Daarom heb ik besloten zelf iets te bouwen. Het hier gepresenteerde instrumentje kan niet wedijveren met de complexe alleskunners die op de markt zijn; het is slechts een bescheiden inductiemeter waarmee ik de waarde van een onbekende zelfinductie kan bepalen. Online circuleren veel ontwerpen voor dit soort apparaten, soms op basis van Arduino.
Enkele jaren geleden ontdekte ik de website van F. Kudelsko, die een kleine DHZ- inductiemeter beschrijft waarmee zelfinducties van enkele tientallen nH tot ongeveer 10 mH kunnen worden gemeten. Een klein Windows-programma haalt via USB de waarde van de te testen spoel op en geeft die weer. Hoewel ik deze aanpak heel interessant vond, zocht ik meer naar een stand-alone apparaat. Toch wil ik de auteur hier bedanken voor het delen van zijn werk, waarop ik mijn ontwerp heb gebaseerd.
Werkingsprincipe
Het werkingsprincipe van de inductiemeter is vrij eenvoudig. De onbekende zelfinductie maakt deel uit van een LC-oscillator. Door vervolgens de oscillatorfrequentie te meten, kan de waarde van de onbekende zelfinductie worden bepaald.
Er zijn veel manieren om een LC-oscillator te construeren. Hier maken we een Colpitts-oscillator (figuur 1).
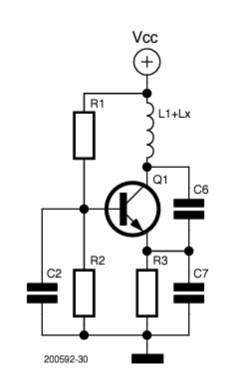
De schakeling maakt gebruik van een transistorversterker met gemeenschappelijke basis (Q1) met de ingang aan de emitter en de uitgang aan de collector. Zonder in detail te treden over hoe deze oscillator werkt, wordt de uitgangsfrequentie gegeven door de formule van Thomson (ook bekend als Lord Kelvin):
f = 1 / (2π √(LC))
Na herschrijven krijgen we:
L = 1 / (4π2 f2C)
Hierin staat C voor de serieschakeling van de condensatoren C6 en C7:
C = (C6 × C7) / (C6 + C7)
Als de waarde van deze condensatoren bekend is – ik heb ze nagemeten met mijn capaciteitsmeter voor een zo nauwkeurig mogelijke berekening – hoeven we slechts C in de herschreven formule in te vullen (samen met de meetfrequentie) om de waarde van L te vinden. Het verdient aanbeveling om 5%-MKT-exemplaren te gebruiken.
Schema
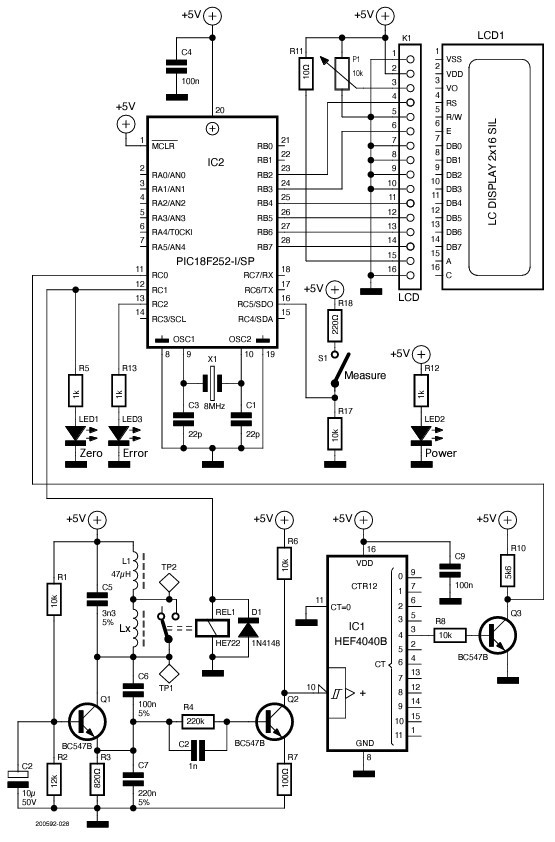
De schakeling van de inductiemeter is getekend in figuur 2. Ik heb de PIC18F2550-microcontroller uit het oorspronkelijke schema vervangen door een PIC18F252 omdat ik geen USB-interface nodig had, en ik heb een 2×16 alfanumeriek LCD toegevoegd. Sommige componentenwaarden zijn bepaald door wat ik had liggen.
Over C5: deze condensator is een ‘erfenis’ uit het oorspronkelijke ontwerp [1] en heeft een geringe invloed op de oscillatorfrequentie. Met C5 wordt de in de berekeningen te gebruiken C gegeven door:
C = C5 + (C6 × C7) / (C6 + C7)
C5 moet eenzelfde tolerantie hebben en van dezelfde kwaliteit zijn als C6 en C7.
Met mijn componentwaarden (en Lx kortgesloten door het relais, zie verderop) bedraagt de theoretische werkfrequentie van de oscillator 83,821 kHz (86,488 kHz met ideale componenten). Meting met een oscilloscoop gaf een frequentie van 88,652 kHz, een verschil van 5,4%.
Alle berekeningen worden door de microcontroller uitgevoerd. Deze meet de frequentie van de oscillator via poort RC0. Hiervoor is het essentieel dat de frequentie wordt gereduceerd tot een waarde die voor de MCU aanvaardbaar is. Een binaire teller van type 4040 (IC1) neemt dit voor zijn rekening. De hier gebruikte deelverhouding is 1/32. Ik heb een HEF4040B gebruikt voor IC1 omdat ik die had liggen, maar een 74HCT4040 zal het ook doen.
L1 en het relais
Om ervoor te zorgen dat de oscillator snel start, ongeacht de waarde van de onbekende zelfinductie Lx, wordt een andere spoel L1 er in serie mee gezet. Bij een meting wordt de frequentie van de oscillator bepaald door deze twee zelfinducties. We willen echter alleen de waarde van Lx weten. Daarom voert de software eerst een meting uit met Lx kortgesloten. Deze waarde, de nul-referentie, wordt opgeslagen en later gebruikt om de waarde van Lx te berekenen.
Voeding
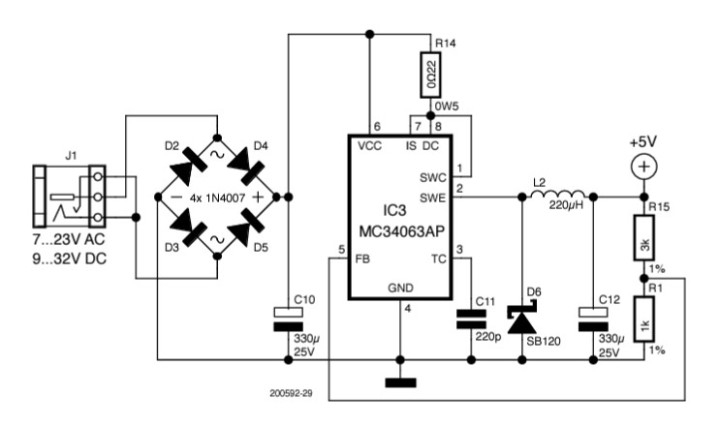
De voeding is gebaseerd op een MC34063 (IC3), een schakelende (buck-)regelaar die een nette spanning van +5 V levert (figuur 3). De ingangsspanning wordt eerst gelijkgericht en vervolgens gefilterd door condensator C10 voordat hij IC3 bereikt. Gelijkrichter D2...D5 maakt het mogelijk om zowel AC- als DC-netadapters te gebruiken zonder dat we ons zorgen hoeven te maken over de polariteit. Zodoende accepteert het apparaat 7...23 VAC of 9...32 VDC op zijn ingang. De werkfrequentie is ongeveer 30 kHz. Het stroomverbruik van de complete schakeling bedraagt slechts 35 mA – geen probleem voor deze voedingsschakeling die maximaal 1,2 A kan leveren. Het middencontact van de voedingsconnector heeft een diameter van 2 mm, waardoor veel standaard-netadapters kunnen worden gebruikt.
De firmware
Ik heb een klein programma ontwikkeld in mikroC dat, net als het oorspronkelijke ontwerp, de meting van elke zelfinductie mogelijk maakt en dat de waarde ervan (in nH, µH of mH) op het LC-display weergeeft. De keuze van het meetbereik gebeurt automatisch. Het meten van de waarde van Lx gebeurt in twee stappen:
1. Systeemkalibratie (relais gesloten, figuur 4).
2. Feitelijke meting met weergave van de berekende waarde.

Timer1 van de MCU gaat tellen bij de eerste opgaande flank van RC0; hij telt gedurende één seconde (onder besturing van door Timer0). Na één seconde is de waarde van Timer1 een maat voor de frequentie van het signaal op zijn ingang. Nu kan de processor alle berekeningen uitvoeren die nodig zijn om de waarde van L1 (stap 1) of Lx (stap 2) te bepalen.
Het LC-display laat zien wat er gebeurt. Tijdens stap 1 brandt de gele LED (LED1, Zero). Als er geen onbekende zelfinductie is aangesloten, dan verschijnt de melding “no coil detected” en licht de rode LED (LED3, Error) op. Controleer in dat geval of de onbekende spoel correct is aangesloten en start het meetproces opnieuw met een druk op de knop.
Het gebruik van het systeem is eenvoudig en comfortabel, aangezien de meting volledig automatisch verloopt. Het enige wat je moet doen is kort (ca. 0,5 s) op de knop te drukken die met RC5 is verbonden, om de procedure indien nodig opnieuw te starten. Op het display verschijnt een pijl die een nieuwe meting aangeeft.
Bouw
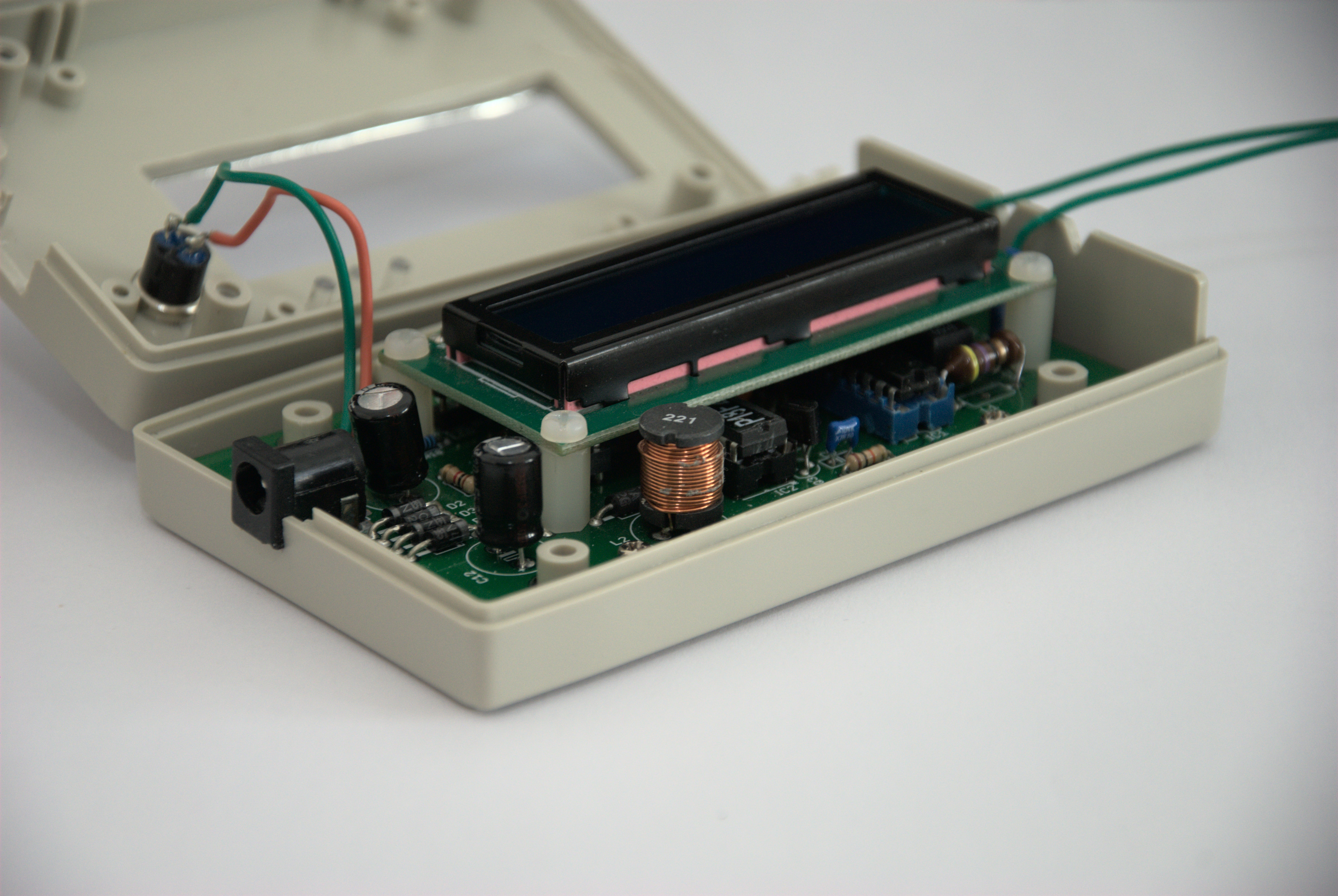
Toen het prototype eenmaal naar tevredenheid functioneerde, heb ik er een dubbelzijdige print voor ontworpen. Deze past in een Multicomp MCRH3135-behuizing (figuur 5). Je geoefende oog heeft waarschijnlijk de kleine afmetingen van de pads opgemerkt. De meeste hebben een diameter van 1,4 mm met een gat van 0,8 mm. Ik raad je daarom sterk aan een goede soldeerbout te gebruiken voor het monteren van de componenten, of zelf een andere print te ontwerpen.
Hoewel ik mijn best heb gedaan om een goede PCB te ontwerpen, had ik toch twee dingen over het hoofd gezien:
- Ik vergat de footprint van voedingsconnector J1 te controleren. Als je hetzelfde model gebruikt als ik, zul je de printplaat een beetje moeten bewerken met een Dremel-tool of zoiets (figuur 6). Aangezien de connector niet langer goed wordt fixeerd door de soldeerverbindingen, heb ik hem (na het solderen) met lijm op de print vastgezet.
- Een ICSP-connector voor het in-circuit programmeren van de MCU schittert door afwezigheid, wat nogal onhandig is. De MCU kan echter op een breadboard of prototyping board worden geprogrammeerd voordat hij op de print wordt gemonteerd.
Het LC-display is gemonteerd op een 16-polige enkelrijige connector, en is stevig op de print bevestigd met vier M3×10 nylon afstandsbussen en passende schroeven en moeren.
De IC’s zijn op voetjes gemonteerd, wat natuurlijk niet per se noodzakelijk is (tenzij je de microcontroller wilt herprogrammeren...). Het relais is direct op de print gesoldeerd, voornamelijk om ongewenste parasitaire capaciteiten en zelfinducties te vermijden. De drie LED’s zijn zeer dicht op de print gesoldeerd, ik heb lichtgeleiders (glasvezel) gebruikt om de zichtbaarheid te verbeteren. Het door de compiler geproduceerde binaire bestand moet in het flash-geheugen van de microcontroller worden geladen met een programmer zoals de PICkit3.
Nadat ik het frontpaneel had ontworpen met het gratis Front Panel Designer-tool [2][3], heb ik het met een laserprinter op zelfklevende alufolie (3M) geprint. Het resultaat is mooi, maar het is lastig om het frontpaneel precies uit te snijden en op de juiste plaats te plakken.
Enkele details tot slot
Het verdient aanbeveling de verbindingen tussen het apparaat en de te meten zelfinductie Lx zo kort mogelijk te houden, omdat die fouten kunnen introduceren ten gevolge van parasitaire capaciteiten en zelfinducties. Als meetsnoertjes gebruik ik meeraderige draad van 0,2 mm2 (12 cm lang) met meetklemmen aan het uiteinde. En zoals voor elk instrument geldt: laat het een paar minuten op temperatuur komen alvorens te gaan meten.
Vragen of opmerkingen?
Hebt u technische vragen of opmerkingen naar aanleiding van dit artikel? Stuur een e-mail naar de auteur via pleguen@gmail.com of naar de redactie van Elektor via redactie@elektor.com.
Discussie (0 opmerking(en))