
MicroPython voor de ESP32 en consorten
op
De laatste jaren is de populariteit van Python enorm toegenomen, niet in het minst door de beschikbaarheid van single board-systemen zoals de Raspberry Pi. Maar Python heeft ook een bredere toepassing gevonden op andere gebieden zoals kunstmatige intelligentie en machine learning. Het ligt daarom voor de hand om te kijken hoe we Python (of in ieder geval de MicroPython-variant) kunnen gebruiken in microcontroller projecten.
Dit artikel bespreekt de basis van MicroPython, en in het bijzonder de belangrijkste beschikbare commando’s en bibliotheken. Met een ESP32-microcontroller demonstreren we een paar kleine toepassingen: de microcontroller wordt geprogrammeerd met firmware die de Python-commando’s interpreteert. Het Python-programma zelf wordt geschreven met behulp van een ontwikkelomgeving op een PC, en Python-commando’s kunnen van de PC naar de microcontroller worden gestuurd als een heel programma of één voor één. Dat kan zowel via USB als via een draadloos netwerk. Laten we deze aspecten een voor een bekijken.
Programmeer- en ontwikkelomgevingen
In tegenstelling tot het Arduino-ecosysteem kan MicroPython werken met een reeks van geïntegreerde ontwikkelomgevingen (IDE’s). Momenteel zijn de twee meest gebruikte omgevingen:
- µPyCraft
- Thonny
Ook kunnen we overwegen Anaconda Navigator te installeren, dat vooral wordt gebruikt voor het programmeren van microcontrollers op het gebied van kunstmatige intelligentie. Elke aanpak heeft zijn eigen voor- en nadelen. Zo heeft de μPyCraft IDE een minder verfijnde gebruikersinterface, met eenvoudige grafische elementen die doen denken aan tekstgeoriënteerde besturingssystemen.
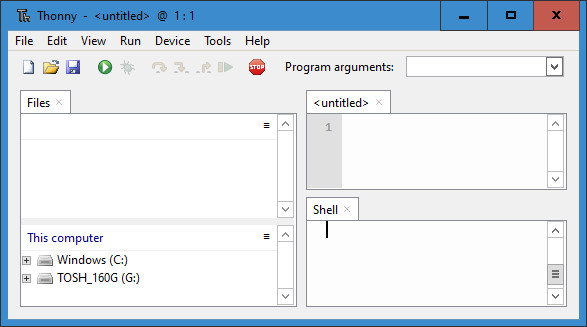
Thonny daarentegen biedt een complete grafische gebruikersinterface in de stijl van Windows (zie figuur 1). Deze IDE is zeer populair in de maker-cummunity, met name omdat hij beschikbaar is voor een Raspberry Pi die draait onder het besturingssysteem Raspbian. Veel Raspberry Pi-gebruikers zijn dan ook al zeer bekend met Thonny. Thonny draait op alle belangrijke besturingssystemen, waaronder Windows, Mac OS X en Ubuntu Linux, en is gratis te downloaden.
Voor het gebruik van Thonny is het noodzakelijk dat Python 3 geïnstalleerd is op de machine die gebruikt zal worden voor ontwikkeling. Installatie-instructies zijn te vinden op de betreffende website.
Vervolgens kunnen we Thonny zelf installeren. Selecteer rechtsboven op de pagina eerst het juiste besturingssysteem. Starten van het gedownloade bestand zal het gebruikelijke installatieproces starten. De IDE is nu klaar om onze eerste Python-applicatie te ontwikkelen.
Installation de l'interpréteur
De volgende stap is het installeren van de MicroPython-firmware zelf. Deze kan worden verkregen van lde officiële MicroPython-website, waar een reeks microcontroller-opties beschikbaar is. In dit artikel kijken we specifiek naar de ESP32, en dus moeten we de laatste versie downloaden die compatibel is met dit type microcontroller. Klik onder Espressif ESP-based boards, op de afbeelding met als onderschrift Generic ESP32 module. De pagina die nu opent biedt een aantal verschillende firmware-varianten. Merk op dat de meest recente versie van de firmware vaak gemarkeerd is als ‘unstable’. Deze optie is eerder bedoeld voor de ontwikkelaars van de interpreter-firmware zelf en voor mensen met een avontuurlijke inslag. Degenen onder ons die de voorkeur geven aan een stabieler systeem kunnen de meest recente niet als ‘unstable’ gemarkeerde versie kiezen:
GENERIC : esp32-idf3-20200902-v1.13.bin
Klik op de juiste link en de firmware wordt gedownload.
Nu kunnen we het microcontrollerboard (bijvoorbeeld een ESP32-PICO-KIT: zie Benodigde onderdelen) via USB aansluiten op de PC en vervolgens de Thonny IDE starten.
Hier moeten we Select interpreter kiezen in het Run-menu, wat het Thonny options venster opent: zie figuur 2. Op het tabblad Interpreter kunnen we kiezen uit een reeks opties, waaronder enkele die specifiek zijn voor de ESP32.
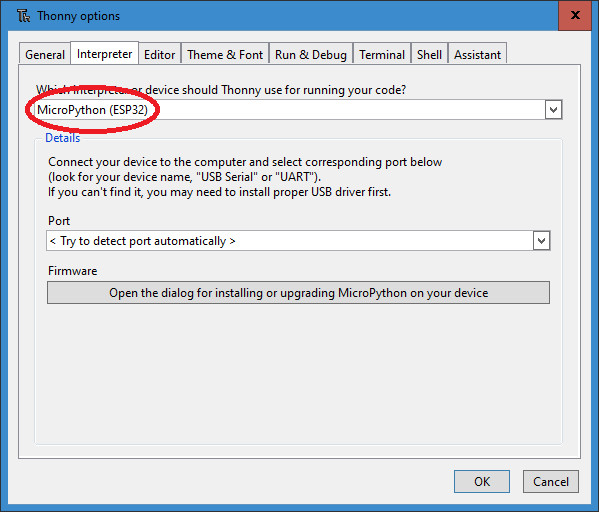
Selecteer onder Port de USB-poort waarop de ESP32 is aangesloten. Als alternatief kunt u de optie Try to detect port automatically selecteren. Dit werkt echter niet in alle gevallen betrouwbaar.
Door in het vakje onder Firmware te klikken wordt nu de installer gestart. De poort wordt niet automatisch geconfigureerd en moet opnieuw worden ingevoerd. Navigeer vervolgens naar de firmware die we hierboven hebben gedownload.
Door op Install te klikken wordt het installatieproces gestart. Als het proces is voltooid blijft het venster open: sluit het en u bent klaar om te beginnen met het programmeren van uw ESP32 in MicroPython.
Bibliotheken
Werken met Python betekent werken met bibliotheken. Elk programma vanaf nul schrijven is op zijn zachtst gezegd zeer inefficiënt, en het overweldigende succes van Python is voor een groot deel te danken aan de vele bibliotheken die ervoor beschikbaar zijn. Helaas kunnen binnen de beperkte mogelijkheden van een microcontroller niet alle bibliotheken worden gebruikt, en daarom is een speciale selectie bibliotheken ontwikkeld voor gebruik met MicroPython. Veel van deze bibliotheken zijn standaard opgenomen in de Thonny IDE-download.
De twee belangrijkste standaardbibliotheken in MicroPython zijn machine en time. Het import commando wordt gebruikt om de bibliotheken beschikbaar te maken voor gebruik op de microcontroller. De volgende benaderingen (onder andere) kunnen worden gebruikt om een bibliotheekfunctie toegankelijk te maken:
from module import name
In het eerste geval wordt de gehele module geïmporteerd; in het tweede geval worden alleen de gespecificeerde functies binnengehaald.
De machine-module bevat functies die specifiek zijn voor de hardware van een bepaalde microcontroller. Deze functies geven direct en ongehinderd toegang tot en controle over hardwarecomponenten, waaronder de CPU, timers, bussen en in- en uitgangspinnen. Wees ervan bewust dat verkeerd gebruik van deze module fouten, crashes en in extreme gevallen zelfs schade aan de hardware kan veroorzaken.
De Pin-klasse is een van de belangrijkste onderdelen van de machine-module. Een Pin-object wordt gebruikt om een I/O-pin aan te sturen en wordt toegewezen aan een fysieke pin op de microcontroller. Met het object kunnen uitgangsniveaus worden aangestuurd en ingangsniveaus worden gelezen.
De Pin-klasse voorziet in methoden om de modus van de pin in te stellen. Bijvoorbeeld: IN en OUT kunnen worden gebruikt om een pin te configureren als respectievelijk een ingang of een uitgang.
De time-module biedt een reeks tijdgerelateerde functies. De sleep-klasse uit deze module pauzeert de uitvoering van het lopende programma gedurende een gespecificeerd aantal seconden. Het argument kan zelfs een floating-point waarde zijn, zodat exacte vertragingen van een fractie van een seconde kunnen worden gespecificeerd. De commando’s
from time import sleep
maken de Pin- en sleep-functies beschikbaar. Met de eerste kunnen we praten met de individuele poortpinnen van de microcontroller, en met de tweede kunnen we tijd-gebaseerde functionaliteit implementeren. Met behulp van het commando
kunnen we een object led maken dat gekoppeld is aan I/O-pin nummer 2, en deze pin configureren als een uitgang. We kunnen nu verschillende waarden aan dit object doorgeven. Als we bijvoorbeeld het commando
uitvoeren dan zal de waarde 1 naar het object worden geschreven. Dat betekent weer dat de bijbehorende I/O-pin, pin 2, op een hoog spanningsniveau wordt gezet. In het geval van de ESP32 is dat 3,3 V.
De REPL-console
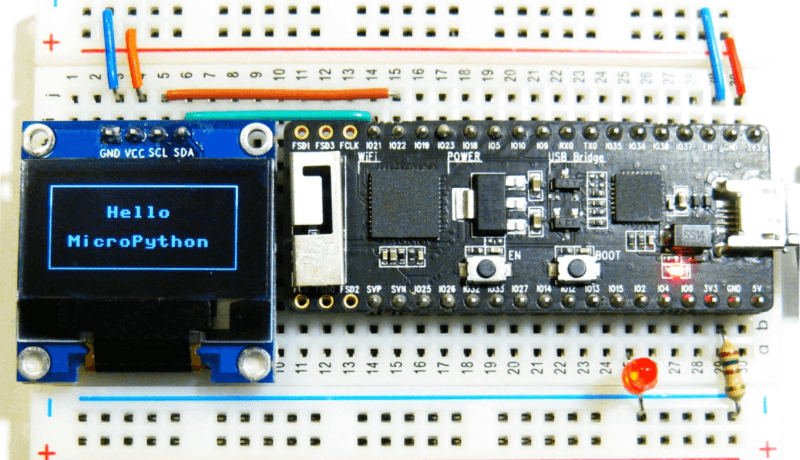
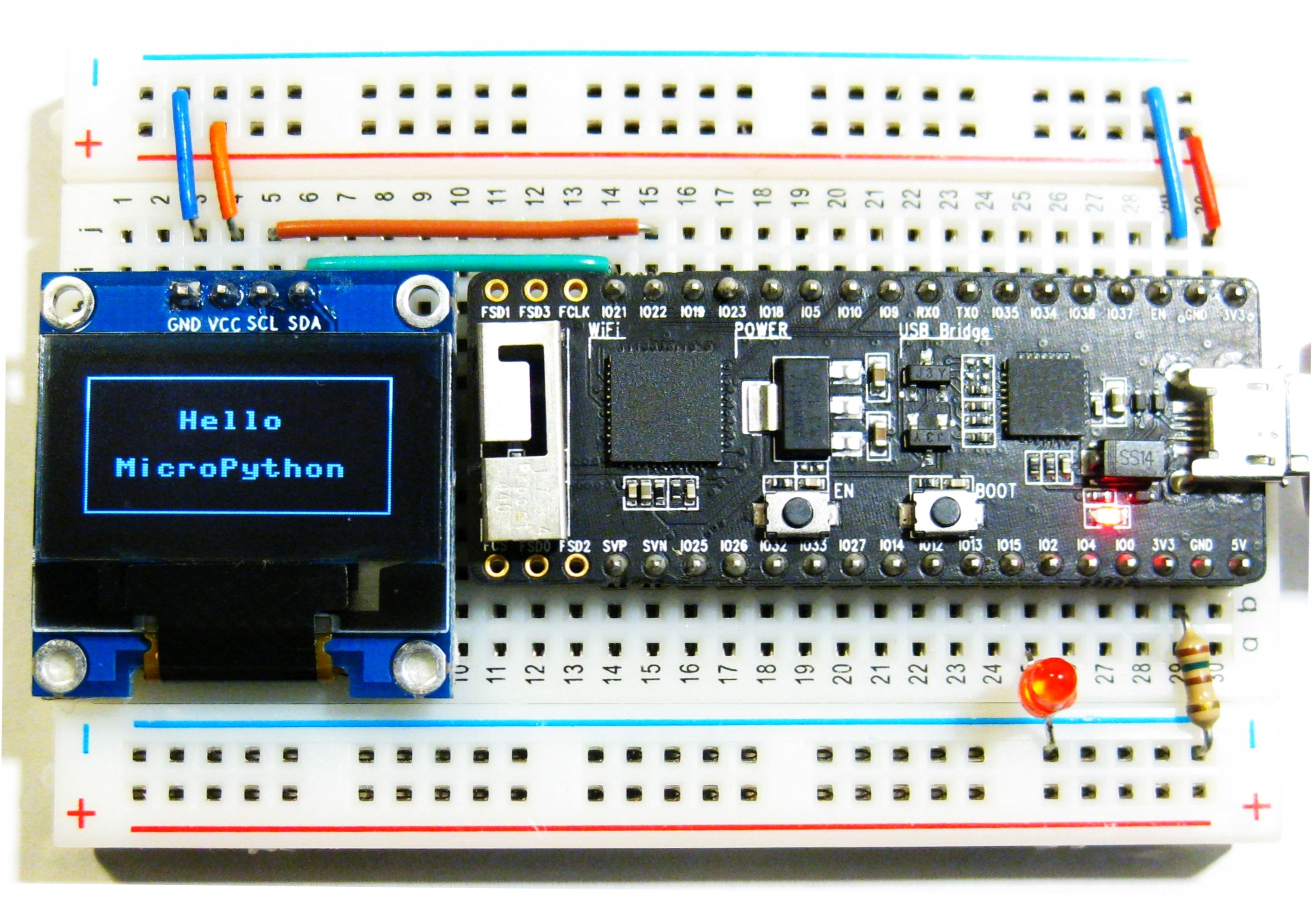
Het is mogelijk om de toestand van een poort-pin te controleren door er eenvoudig via een stroombegrenzende weerstand een LED op aan te sluiten. (Figuur 3 laat zien hoe dit gedaan wordt, en ook hoe we een stap verder kunnen gaan door een volledig OLED-paneel aan te sluiten: daarover later meer).
De poort, en dus ook de LED, kan heel eenvoudig worden aangestuurd met behulp van wat de ‘REPL-console’ wordt genoemd. REPL staat voor Read Evaluate Print Loop, wat een interactieve MicroPython-invoermethode is waarmee we rechtstreeks op de ESP32 commando’s kunnen uitvoeren, een zeer eenvoudige manier om commando’s en programma’s te testen.
De REPL-console wordt in Thonny de ‘shell’ genoemd en is beschikbaar rechtsonder in het hoofdvenster. U kunt de commando’s uit de uittreksels hierboven direct in deze box invoeren: zie figuur 4.
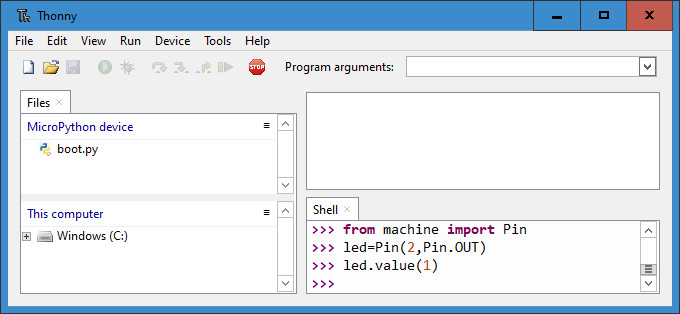
Na het invoeren van het laatste van de bovenstaande commando’s zou de LED moeten oplichten. Het commando led.value(0) kan worden gebruikt om de LED weer uit te schakelen.
De REPL console heeft een paar interessante functies die het werken met MicroPython erg handig maken. Eerder ingevoerde commandoregels worden bijvoorbeeld opgeslagen, en kunnen indien nodig met de pijltjestoetsen weer worden opgeroepen.
Een andere handige functie is het aanvullen met tabs. Door op de ‘Tab’-toets van het toetsenbord te drukken, wordt automatisch geprobeerd een gedeeltelijk ingevoerd woord te vervolledigen. Dit kan zelfs worden gebruikt om informatie te verkrijgen over de functies en methoden die beschikbaar zijn in een module of die op een object van toepassing zijn.
Als u bijvoorbeeld “ma” invoert en op de ‘Tab’-toets drukt, wordt automatisch “machine” ingevuld (ervan uitgaande dat de machine-module reeds is geïmporteerd zoals hierboven beschreven). Door nu op de punt-toets (‘.’) en vervolgens weer op ‘Tab’ te drukken, verschijnt een complete lijst van alle functies die in de machine-module beschikbaar zijn: zie figuur 5.
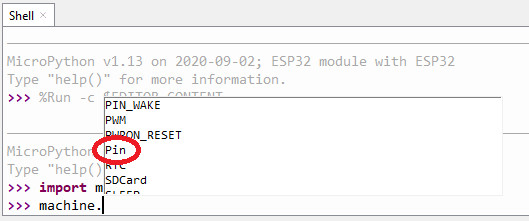
Deze functie maakt het in veel gevallen overbodig om commando’s, objecten en methoden op te zoeken in de documentatie.
Draadloze toegang met WebREPL
Een van de grote voordelen van de ESP32 is zijn uitstekende ondersteuning voor draadloze connectiviteit. Wat is er dan logischer dan de REPL-console beschikbaar te maken via zo’n verbinding? Om dit te doen kunnen we gebruik maken van de WebREPL-interface.
De eerste stap om WebREPL aan de praat te krijgen, is zorgen dat het op de ESP32 geïnstalleerd en ingeschakeld is. WebREPL is standaard niet ingeschakeld en moet worden ingeschakeld met het eenmalige commando
via de seriële poort. U krijgt de mogelijkheid om de functie in of uit te schakelen, en om een wachtwoord in te stellen. Na de configuratie moet de ESP32 opnieuw worden opgestart.
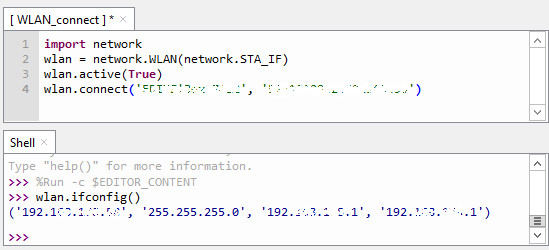
Om WebREPL via een draadloos netwerk te gebruiken, moet de ESP32 eerst verbonden zijn met dat netwerk. Geef daartoe de volgende commando’s via de seriële REPL-console.
wlan = network.WLAN(network.STA_IF)
wlan.active(True)
wlan.connect('ssid', 'password')
De plaatshouders ssid en password moeten natuurlijk worden vervangen door de gegevens voor uw lokale draadloze netwerk. De opdracht
geeft vervolgens de IP-adresinstellingen weer die de ESP32 gebruikt om met het netwerk te communiceren: zie figuur 6.
De commando’s
webrepl.start()
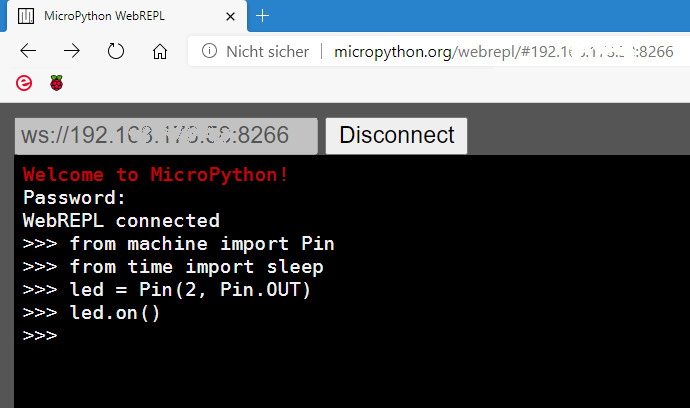
zullen nu de WebREPL-client inschakelen. In een webbrowser kunt u naar het adres
http://micropython.org/webrepl/#xxx.xxx.xxx.xxx:8266
gaan waarbij u xxx.xxx.xxx.xxx moet vervangen door het IP-adres dat u eerder met het commando wlan.ifconfig() hebt bepaald. U kunt dan het tabblad Connect gebruiken om verbinding te maken met de ESP32 met het wachtwoord dat u eerder tijdens de installatieprocedure hebt ingesteld.
Wanneer WebREPL wordt opgestart, kan het zijn dat de console in de ‘raw REPL’-modus staat. Dit maakt het mogelijk om commando’s direct in te voeren met kopiëren en plakken. In zulke situaties kunt u op control-B drukken om over te schakelen naar de normale modus, waarin u normaal commando’s kunt invoeren.
We zijn nu in staat om de ESP32 volledig draadloos te besturen. Met de eenvoudige schakelcommando’s voor de uitgang kunnen we al basisfuncties voor domotica uitvoeren: zie figuur 7.
Als er een geschikt bestandssysteem op de ESP32 is geïnstalleerd, is het ook mogelijk om draadloos software-updates uit te voeren, ook wel over-the-air (OTA) updates genoemd. Wanneer u met WebREPL werkt, moet u er rekening mee houden dat dit een experimentele functie is, waarvan dus niet verwacht kan worden dat hij in alle situaties absoluut betrouwbaar werkt.
Programmacontrole
De REPL- of WebREPL-console is het meest geschikt voor het uittesten van ideeën. Voor conventionele programmaontwikkeling is het editorpaneel (boven de REPL-console in het Thonny-venster) meer geschikt. Daar kunnen we bijvoorbeeld het hieronder beschreven programma voorbereiden dat is ontworpen voor automatische controle van nachtverlichting en verlichting van trappenhuizen: zie figuur 8.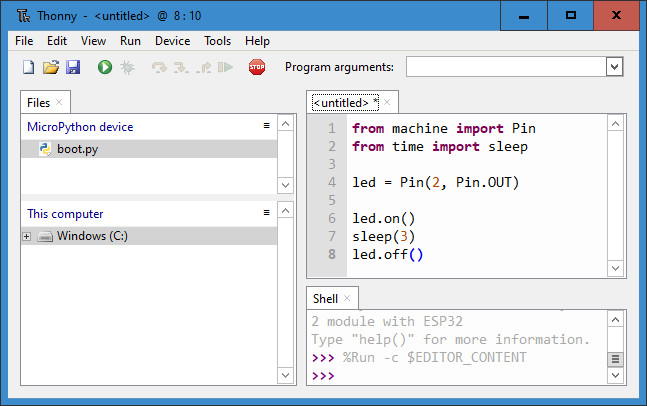
Zodra de code is ingevoerd en gestart met het start-icoon (witte pijl in een groene cirkel), wordt u gevraagd om het programma op te slaan. Kies hier de optie MicroPython-device en voer een programmanaam in (bijvoorbeeld Automatic_LED) en bevestig het opslaan. De LED zal nu gedurende drie seconden oplichten en daarna automatisch doven. Als u nogmaals op de startknop drukt, kan het programma onmiddellijk opnieuw worden uitgevoerd.
Om dit in het klassieke ‘blinky’ knipperLED-demonstratieprogramma te veranderen, hoeven we alleen maar een while-statement toe te voegen. Dit zorgt ervoor dat een bepaald commando of blok van commando’s herhaaldelijk wordt uitgevoerd. Het specifieke geval van while True: creëert een zich eindeloos herhalende lus: in dit geval betekent dat dat de LED continu zal knipperen.
from time import sleep
led = Pin(2, Pin.OUT)
while True:
led.on()
sleep(0.5)
led.off()
sleep(0.5)
Merk hier op dat het while-statement moet worden afgesloten met een dubbele punt. Het volgende blok commando’s is, volgens de standaard Python-conventie, ingesprongen met een constante hoeveelheid spaties. Thonny zorgt automatisch voor deze inspringing: zodra u een dubbele punt invoert, gevolgd door een druk op Enter, verschijnt de cursor op de volgende regel, één niveau ingesprongen. En natuurlijk biedt de programma-editor ook de functie tab-aanvullen. Een lopend programma kan worden gestopt door op control-C te drukken.
MicroPython in een notendop
Hoewel de verzameling bibliotheken de levensader van MicroPython is, is een behoorlijke beheersing van de basiscommando’s noodzakelijk om programma’s van anderen te begrijpen en om uw eigen programma’s te schrijven. Daarom zullen we nu kort kijken naar de krachtigste MicroPython-commando’s.
Eenvoudig commentaar wordt voorafgegaan door het ‘#’ symbool. Het commentaar loopt van ‘#’ tot het einde van de regel.
hello ESP32
Commentaar wordt tijdens de uitvoering van het programma genegeerd; het is er alleen om de ontwikkelaar van het programma informatie te geven. Met het hier gebruikte commando print() kan informatie worden uitgevoerd naar de console, zowel tekst- als numerieke informatie; anderzijds kan print() ook rechtstreeks vanuit het terminalvenster worden aangeroepen.
Zoals we hierboven hebben gezien in het knipper-LED voorbeeldprogramma, kunnen statements gegroepeerd worden in blokken die geïdentificeerd worden door hun inspringing. Dat betekent dat accolades (‘{’ en ‘}’) en consorten niet nodig zijn. Het voordeel van deze aanpak is dat u min of meer gedwongen wordt tot een gestructureerde programmeerstijl.
Het is heel eenvoudig om een variabele aan te maken in MicroPython, en het is met name niet nodig om het type van een variabele op te geven. Variabelen kunnen ook direct in de console worden gebruikt, en wel als volgt.
>>> b=12
>>> print(a*b)
204
In MicroPython hebben de rekenkundige operatoren hun conventionele wiskundige betekenis. Naast optellen, aftrekken, vermenigvuldigen en delen hebben we ook de //-operator voor integer-deling, % voor modulo (of rest van deling), en ** voor machtsverheffen.
De gebruikelijke vertakkings- en looping-statements zijn ook in MicroPython aanwezig. Vertakking wordt ondersteund door het sleutelwoord if, gevolgd door een voorwaarde; als de voorwaarde waar is dan worden de volgende statements uitgevoerd. Een else-sleutelwoord kan volgen, en een set van statements introduceren die in plaats daarvan worden uitgevoerd als de voorwaarde onwaar is. Bijvoorbeeld:
# block 01
print ("True")
else:
# block 02
print ("False")
Loops bieden de mogelijkheid om instructies herhaaldelijk uit te voeren. Een reeks instructies wordt uitgevoerd zolang aan een bepaalde voorwaarde wordt voldaan. Er zijn twee varianten beschikbaar:
- ‘while’ loops
- ‘for’ loops
Om de getallen van 1 tot 9 op de console af te drukken, kunt u een while-lus als volgt gebruiken.
while number<10:
print(number)
number=number+1
De reeks te herhalen instructies wordt aangegeven door de inspringing. Deze taak kan ook als volgt worden uitgevoerd met behulp van een for-loop.
print(number)
Automatisch alarmsignaal
Met deze basis programmeerstructuren onder de knie, kunnen we nu ons eerste praktische toepassingsprogramma maken. Het volgende programma is een automatisch SOS-baken dat kan worden gebruikt om een noodsignaal te geven bij zeilen of klimmen.
from time import sleep
led=Pin(2,Pin.OUT)
while True:
for n in range(3):
led.value(1)
sleep(.1)
led.value(0)
sleep(.5)
sleep(1)
for n in range(3):
led.value(1)
sleep(.4)
led.value(0)
sleep(.5)
sleep(1)
for n in range(3):
led.value(1)
sleep(.1)
led.value(0)
sleep(.5)
sleep(2)
Het OLED-display: een klein-formaat beeldscherm
Het is zeker mogelijk om een enkele LED te gebruiken om nuttige informatie over te brengen, bijvoorbeeld met behulp van morsecode zoals in de SOS-toepassing hierboven. Een aanzienlijk modernere benadering is natuurlijk het weergeven van gegevens op een OLED-display. Vaak maken dergelijke panelen gebruik van de SSD1306-displaycontroller. Voor dit voorbeeld gebruiken we een display met een diagonaal van slechts 0,96 inch (ongeveer 2,5 cm) en een resolutie van 128 x 64 pixels.
MicroPython is standaard voorzien van een bibliotheek voor SSD1306-gebaseerde displays. De bibliotheek laat de weergave toe van tekst, numerieke gegevens en eenvoudige graphics.
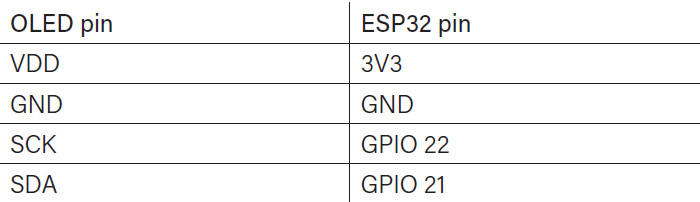
De eenvoudigste SSD1306 modules hebben een interface met slechts vier pinnen, wat voldoende is om het display aan te sturen met behulp van het I2C-busprotocol. De aansluiting op het display wordt geïllustreerd in figuur 3; de vereiste aansluitingen zijn hieronder ook in tabelvorm weergegeven.
Het script in listing 1 voert een tekstbericht uit naar het scherm en tekent enkele eenvoudige grafische elementen in de vorm van een kader dat het bericht omlijnt (zie figuur 3).
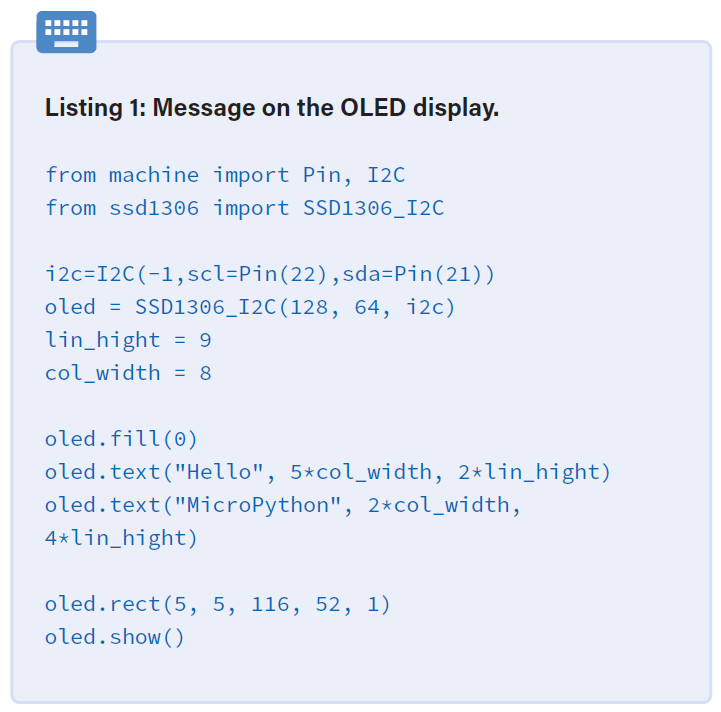
De relevante bibliotheek is beschikbaar als een standaard-package (ssd1306.py in het download-archief) en kan apart naar het board worden geladen. De pinnen die gebruikt worden voor de I2C-interface worden als volgt gedeclareerd:
De eerste parameter, ‘-1’, geeft aan dat de gebruikte module niet over een reset- of een interruptpin beschikt. Het aantal horizontale en verticale pixels in de module wordt opgegeven met het commando
Het display is nu klaar voor gebruik. De functie text() kan worden gebruikt om informatie naar de displaybuffer te schrijven, en het display zelf wordt bijgewerkt met de methode show(). De functie text() accepteert de volgende argumenten.
- het bericht (een string)
- x- en y-coördinaten voor de tekst in pixeleenheden
- optionele tekstkleur: 0 voor zwart (niet verlicht) en 1 voor wit (verlicht)
De methode show() maakt de veranderingen zichtbaar op het scherm. Met de methode rect() kunt u een rechthoek tekenen op het scherm. Deze accepteert de volgende argumenten.
- x- en y-coördinaten voor de linkerbenedenhoek van de rechthoek
- x- en y-coördinaten voor de rechterbovenhoek van de rechthoek
- pixelkleur: 0 voor zwart en 1 voor wit
De instructie
tovert dus een rechthoekig kader langs de rand van het scherm. Met alleen deze eenvoudige commando’s is het voor een toepassing al mogelijk om allerlei soorten informatie weer te geven, van basistekst tot complexe sensorwaarden.
Conclusie
MicroPython is een moderne en krachtige programmeertaal. Bovendien kunnen met zijn bibliotheken complexe projecten snel en eenvoudig worden gerealiseerd. In dit artikel hebben we laten zien hoe u een geschikte IDE installeert en een aantal eenvoudige applicaties maakt. In het tweede deel van deze serie zullen we verdere aspecten van MicroPython bekijken en, als praktische demonstratie, een voorbeeld geven van het aansturen van een grootformaat dotmatrix LED-display.
Meer informatie over MicroPython, over de ESP32-microcontroller en over de hier gepresenteerde voorbeelden is te vinden in het boek MicroPython for Microcontrollers.
Vragen of opmerkingen?
Heb je technische vragen of opmerkingen over dit artikel, e-mail de redactie via: redactie@elektor.com.
Wil je meer artikelen lezen over MicroPython en ESP32?
Discussie (1 opmerking(en))