
Vliegen zonder accelerometers
op
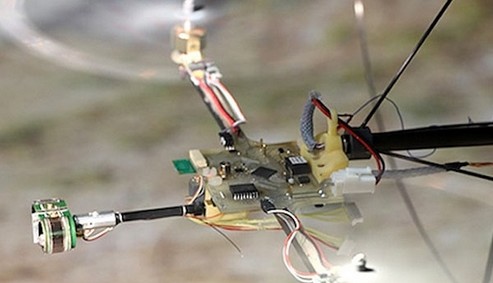
Onderzoekers van het Institut des Sciences du Mouvement in Marseille hebben een vliegende robot ontworpen die kan navigeren en obstakels kan ontwijken zonder gebruik te maken van een accelerometer, hoogtemeter of snelheidsmeter. De BeeRotor navigeert met behulp van ‘optische flow’, het navigatieprincipe dat ook door insecten wordt gebruikt. Voor deze robot met een lengte van 47 cm en een gewicht van slechts 80 gram zijn diverse toepassingen denkbaar zoals minirobots of toepassingen in de ruimtevaartindustrie waar iedere kilogram telt.
Het principe van optische flow wordt duidelijk als we denken aan een rit over een autosnelweg. Bij vooruit kijken blijft het beeld tamelijk stabiel, maar als we opzij kijken lijkt het landschap zich steeds sneller te verplaatsen totdat we bij een hoek van 90° met de rijrichting de snelste beweging waarnemen. Met deze informatie kan de BeeRotor zijn snelheid regelen en de contouren van het landschap volgen.
Om de optische flow te meten is de robot uitgerust met 24 fotodiodes aan de boven- en onderkant van zijn oog. Hiermee kunnen zowel contrast als beweging worden gedetecteerd.
Het ‘brein’ van de BeeRotor wordt gevormd door drie teruggekoppelde regelingen die als een soort reflex op de optische flow reageren en waarmee de BeeRotor snelheid, hoogte en blikveld kan aanpassen.
Discussie (0 opmerking(en))