
Review: Low cost YDLidar X4 kijkt 360º om zich heen
Hardware
 Het bereik van de YDLidar X4 wordt aangegeven met 12 cm tot “minimaal 10 m” over 360 graden. Bij afstanden kleiner dan 2 m is de resolutie beter dan 0,5 mm. Bij afstanden van meer dan 2 m is de resolutie beter dan 1% van de gemeten afstand. De nauwkeurigheid van de hoek waar het obstakel gedetecteerd wordt, bedraagt 0,50 graden bij een scanfrequentie van 7 Hz.
Het bereik van de YDLidar X4 wordt aangegeven met 12 cm tot “minimaal 10 m” over 360 graden. Bij afstanden kleiner dan 2 m is de resolutie beter dan 0,5 mm. Bij afstanden van meer dan 2 m is de resolutie beter dan 1% van de gemeten afstand. De nauwkeurigheid van de hoek waar het obstakel gedetecteerd wordt, bedraagt 0,50 graden bij een scanfrequentie van 7 Hz.Een stabiele voedingsspanning is belangrijk, want deze heeft direct invloed op de prestaties. De datasheet geeft een maximale voedingsrimpel van 100 mV aan waarbij de schakeling nog kan functioneren, maar het is beter om de spanningsfluctuatie tot 50 mV of kleiner te beperken.
Praktijk
In de praktijk werkt de YDLidar X4 meteen vrij aardig onder Windows 7 (64-bit). De drivers voor het USB-interfaceprintje zijn eenvoudig te installeren en het aanstuur/interface-programma (“PointCloudViewer_V02R02.exe”) werkt eenvoudig. Misschien wel iets té eenvoudig, maar voor een demo is het perfect.
onder Windows 7 (64-bit). De drivers voor het USB-interfaceprintje zijn eenvoudig te installeren en het aanstuur/interface-programma (“PointCloudViewer_V02R02.exe”) werkt eenvoudig. Misschien wel iets té eenvoudig, maar voor een demo is het perfect.Enkel de led voor het aangeven van de spanning op het USB-interface-bordje brandt wel zo zwak, dat we ons afvroegen of de print niet defect was. Een tweede exemplaar toonde dezelfde werking, dus we gaan ervan uit dat het zo bedoelt is.
Bij het opstarten van het PointCloudViewer-programma wordt er gevraagd naar de COM-poort en welke Lidar-versie je aan hebt gesloten. Rechtsboven kun je middels het vlaggetje de taal van de software instellen (pas na opnieuw starten van de applicatie wordt de nieuwe taal ingesteld). Na bevestigen opent het programma.

De lidar wordt gestart met het ‘play’-symbooltje. Klik erop en de kop begint te draaien. Op het scherm verschijnen een aantal punten die representatief zijn voor objecten in de ruimte. De zijde waar de motor gemonteerd is komt overeen met de positieve zijde van de y-as.
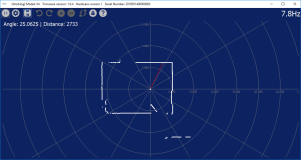
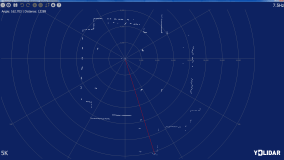
Met de ‘save’-knop kun je de huidige meting exporteren als tekstbestand waarin de hoek en de bijbehorende afstandswaarde telkens in de vorm
angle:xx.xx , distance:xxxx
opgeslagen worden.
Conclusie
Uit alles blijkt wel dat de YDLidar X4 bedoeld is om te implementeren in een robotsysteem. Het ROS- en SDK-pakket sturen daar duidelijk op aan. Een gedegen kennis van Linux en/of Visual Studio 2010 zal haast onontbeerlijk zijn om de YDLidar X4 in een praktische toepassing nuttig te kunnen gebruiken. Maar dat is iets waar je waarschijnlijk al op gerekend had wanneer je met robots aan de slag ging.Voor een zeer redelijk bedrag krijg je een prima bruikbare Lidar waarmee je je robot ogen in alle richtingen geeft en die ook nog eens met een flinke berg software komt.



YDLidar X4
Normale prijs: € 89,95
Actie prijs: € 79,95
Read full article
Hide full article
Discussie (8 opmerking(en))