
Leidingen opsporen
op
Dr. Thomas Scherer (Duitsland)
Het begon allemaal twee jaar geleden: in het voorjaar ging het gras van mijn gazon weer groeien en werd het tijd om de grasmaaier uit zijn winterslaap te halen, schoon te maken, vol te tanken en ermee aan de slag te gaan. Maar het jaar daarvoor had ik gezien hoe het gazon van mijn buren keurig en gelijkmatig door een robotmaaier werd bijgehouden, en begon ik mij af te vragen waarom ik het zelf zou moeten doen als het ook automatisch kan? Erover nagedacht, apparaat aangeschaft, maar dat was nog maar het begin...
Leidingen en gazon
Zodra je de grote kartonnen doos met het nieuwe stuk techniek hebt ontvangen, komen er problemen op je af die je maar al te gemakkelijk flink kunt onderschatten. Tijdens het onderzoek naar het apparaat dat voor mijn U-vormige tuin met zijn nauwe doorgangen van minder dan 1 m breed het beste geschikt zou zijn, had ik natuurlijk de spec’s van deze autonome grasmaaiers bekeken. Ik wist dat zo’n robotmaaier niet echt intelligent is en zijn route door het gras van het toeval laat afhangen. Als hij ergens tegenaan stoot rijdt hij achteruit, draait (willekeurig) een stukje en probeert verder te gaan, net zo lang totdat de ingestelde dagelijkse maaiperiode voorbij is (of de accu leeg raakt).
Een nogal domme robot dus, zonder een camera of een interne kaart van zijn omgeving. Om ervoor te zorgen dat hij op het gras blijft en niet op plaatsen komt die niet moeten worden gemaaid, moet rondom een begrenzingsdraad worden aangebracht. Om te zorgen dat hij zijn laadstation kan vinden heeft de robot ook nog een begeleidingsdraad nodig – op het gras, of nog beter: in de grond. Door deze leidingen loopt een gepulste stroom, en met behulp van ingebouwde magneetveldsensoren weet de robot waar hij is. Bij mijn robot (figuur 1) is het signaal zelfs uniek en met een wachtwoord beveiligd, zodat een gestolen robot een onbruikbare robot is. Dat schrikt in ieder geval dieven die een beetje nadenken wel af. De enige extra luxe bij mijn exemplaar is een draadloze verbinding, via een modem, met het internet. Ik kan dus overal op de wereld op mijn smartphone zien wat de robot aan het doen is, en hem bijvoorbeeld als het hard regent naar zijn hok (figuur 2) sturen.


Als tegenprestatie voor het kunnen toekijken bij het automatisch maaien moet je wel eerst zelf de kabels leggen. Bij mij ging het om zo’n 500 m groene litze van ongeveer 1,5 mm2. De eenvoudigste manier is om de kabels op het gazon te leggen en deze iedere 50 cm met een soort plastic haring vast te zetten (figuur 3). Na verloop van tijd verdwijnt de leiding dan volgens de fabrikant in de onderste laag van het gazon. En dat klopt ook voor het grootste deel. Maar dit is natuurlijk alleen bruikbaar op plekken waar je niet vaak je voeten zet, anders lig je al gauw op de grond... Bij paden en borders is het beter om de leiding 10...20 cm diep onder stenen of (beton)platen te leggen. En/of je trekt (met moeite) met een rechte spade gleuven in het gazon en drukt daar de leiding in de aarde. Je kunt natuurlijk ook een professional met een bekabelingsmachine inhuren die dit inspannende werkje in korte tijd uitvoert. Ik kreeg met alle vier de methoden te maken, want toen ik helemaal klaar was merkte ik de gevolgen van een fout in de gebruiksaanwijzing. Daar stond in dat je de afstand van de kabel tot randen en obstakels tussen 15 en 50 cm kon instellen. Hierop vertrouwend heb ik de leidingen op een afstand van 20 cm van de werkelijke grens aangebracht. Toen ik daarna de robot wilde configureren bleek de minimaal instelbare afstand 25 cm te zijn. Mijn stevig geformuleerde klacht had echter resultaat want de fabrikant stuurde netjes een professional met een bekabelingsmachine die de door mij al in de grond gelegde 250 meter leiding opnieuw, maar nu op 30 cm afstand ingroef. Alles was in orde en de maaier maaide perfect, zoals door mij gepland en gehoopt.

Kabelbreuken
Mijn geluk was echter van korte duur. Als je zo intensief met je gazon bezig bent, dan heb je ook problemen. In mijn geval was dat ‘De Strijd tegen de Paardenbloem’. Omdat ik wist waar de kabels lagen was ik de enige met een ‘license to kill’ voor onkruid. In het begin ging dit prima. Maar op een keer ging het mis: bij het uitsteken van een prachtige paardenbloem was ik een (beslissende) centimeter uitgeschoten en de robot bleef eenvoudigweg staan. Ik had de leiding onderbroken. Geen groot probleem want ik wist precies waar ik te dicht bij de leiding had getuinierd. Na wat graafwerk zag ik de doorgesneden kabeleinden. Als er voldoende ruimte is steek je dan de uiteinden in een speciale met vet gevulde waterdichte klem (figuur 4), je knijpt de klem dicht en alles is weer in orde.

Bij één zo’n ongeluk is het echter niet gebleven. In het tweede jaar van het autonome gazonmaaien werd ik waarschijnlijk onvoorzichtiger, want toen ik aan de rand van de tuin over een behoorlijke afstand een paar niet in het gras horende planten had uitgestoken ontdekte ik dat Robbie de Robot hulpeloos en gedesoriënteerd was blijven staan. Uitgerekend bij de rand waar de professionele bekabelingsmachine bezig was geweest, en de leiding extra diep en niet door mij aangelegd onder het oppervlak zat. Wat nu? Alle verdachte plaatsen één voor één uitgraven? Of technische hulpmiddelen inzetten?
Als elektronicus ga ik natuurlijk voor het gebruik van techniek. Dus werd er eerst een koffiepauze ingelast, waarbij mijn voorhoofd flinke denkrimpels kreeg. En toen werd Google aan het werk gezet.
Trial & Error
Mijn eerste idee was om in het omgebouwde hondenhok alle kabels van het laadstation (figuur 5) los te maken en ze via een ‘voorschakelweerstand’ alias gloeilamp direct met de netspanning te verbinden. Dan zouden op de plaats van het defect geluiden in de catgorie ‘gesis en geknetter’ te horen moeten zijn. Als de grond vochtig genoeg zou zijn. En dat was dus niet zo! Staand was er niets te horen, welk uiteinde ik ook met het elektriciteitsnet verbond. En dichterbij, in de zin van knielen en mijn oor in de richting van de grashalmen bewegen, vond ik toch echt een beetje te riskant, want een oor is zoals bekend aan de hersenpan vastgemaakt en neuronen zijn niet compatibel met 230 V. [Noot van de redactie: Wij raden u dringend af om de netspanning als meethulpmiddel te gebruiken – zoiets kan dodelijk zijn!]

Wat dan? Ik had nog wel Hall-sensors liggen, maar bij een onderbreking loopt er geen stroom, en als er geen stroom loopt is er ook geen magnetisch veld om te detecteren. Ja, dat was die robot ook al opgevallen ;-).
Volgens Google injecteren dit soort maairobots, respectievelijk hun laadstations, pulsvormige signalen in de leidingen waarvan je de harmonischen met een langegolfradio zou kunnen ontvangen. Op de FM-band werkt dit niet omdat vochtige aarde hoge frequenties erg goed afschermt. Langegolf dus. Maar waar haal je zoiets antieks vandaan? Bij mij komt de radio van het internet, dus uit de netwerkaansluiting. Maar mijn moeder had nog zo’n analoge draagbare radio in de keuken staan. En dus probeerde ik het met dit leenapparaat. Hierbij mag steeds maar één kabeleinde op het laadstation worden aangesloten, want als je het signaal op beide uiteinden van de doorgesneden kabel zet, vind je de breuk nooit. Zo supernauwkeurig is plaatsbepaling met elektromagnetische straling nou ook weer niet. Maar genoeg gepraat: het werkt!
Je kunt duidelijk een verandering in de ruis vaststellen als de radio in de buurt van de leiding met het signaal wordt gehouden. Het volume moet hierbij zodanig worden ingesteld dat al bij kleine afstandsveranderingen een hoorbaar verschil optreedt. Dit werkt ook bij leidingen die 20 cm diep liggen. Na een stuk of drie ‘testwandelingen’ had ik de plaats gevonden waar het signaal abrupt ophield. Ik was behoorlijk opgelucht en tijdens de reparatie van de beschadiging besloot ik dankbaar om Google een biertje aan te bieden als ik hem ooit zou tegenkomen.
Andere toepassingen
Wie zo nu en dan gaten in muren moet boren om met pluggen en schroeven een schilderij of een boekenplank te bevestigen, zal ook bij toepassing van de vuistregel dat een leiding achter stucwerk altijd horizontaal of verticaal van een stopcontact of schakelaar wegloopt altijd een onbehaaglijk gevoel hebben. Hoewel in Duitsland deze regel sinds de jaren 1950 tamelijk goed wordt gevolgd, zijn er a) uitzonderingen en b) ook nog oudere gebouwen met ‘vrije bedrading’. Daar komt nog bij dat je in badkamers en andere natte ruimtes niet alleen voor de elektrische installatie moet oppassen. Het is dus altijd handig om te weten of er iets van metaal in de muur zit voordat je de boormachine aanzet.
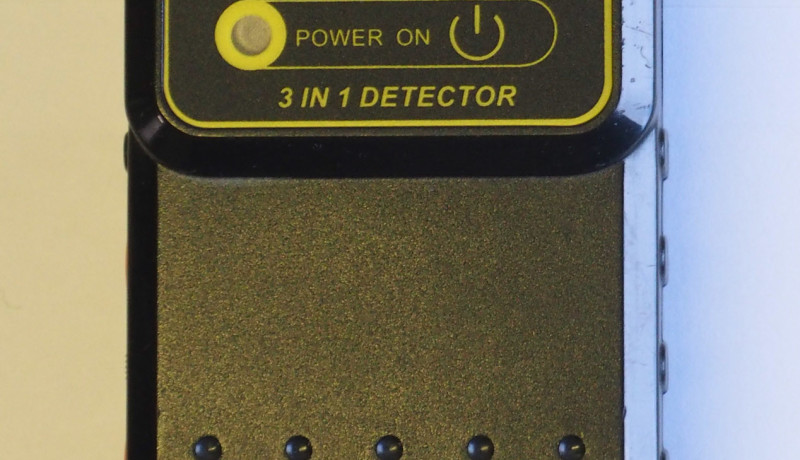
Als het er alleen maar om gaat of er bij het geplande boorgat een kabel of een pijpleiding loopt, dan kun je hiervoor een ‘metaaldetector’ van de bouwmarkt gebruiken. Deze apparaten beslissen onder het motto ‘hier, en vermoedelijk niet daar’ of je het boren kunt riskeren. Iets betere apparaten, zoals die van mij (figuur 6), hebben verschillende bedrijfsmodi en kunnen volgens de fabrikant hout (naar mijn ervaring slecht tot helemaal niet) dan wel het vochtgehalte ervan, metaal (zowel ijzer als andere metalen, dat lukt gedeeltelijk) evenals elektrische wisselvelden (lukt ook gedeeltelijk) detecteren. Voor een gewone huisinstallatie is zo’n apparaat voldoende en in elk geval beter dan niets.

Onlangs heb ik echter voor Elektor een ‘echte’ metaaldetector getest, de CS400 van Velleman (figuur 7). Daarbij heb ik gemerkt dat zo’n apparaat erg geschikt is voor het opsporen van verborgen metalen leidingen en buizen. Zelfs voor het precies lokaliseren van houten balken achter gipsplaten is deze schatzoeker prima bruikbaar. Goedkope varianten van echte metaaldetectoren zijn dus al duidelijk nauwkeuriger en betrouwbaarder dan de simpele detectoren uit de bouwmarkt – maar ook duurder en wat onhandiger.

Alle metaaldetectoren – zowel supergevoelige zoals die van Velleman, of eenvoudige uit de bouwmarkt – kunnen in het algemeen verborgen objecten van metaal of andere materialen in muren en in de grond vinden. Wat hiermee echter niet kan is het opsporen van onderbrekingen, omdat breukplaatsen van nature zo smal zijn dat het ruimtelijk oplossend vermogen niet voldoende is. Hier moet dus de methode met de radio worden gebruikt. Maar wat moeten we doen als er geen HF-signaal of een signaal met steile flanken beschikbaar is?
Dan bouwen we toch onze eigen generator!
Universele oplossing
Door mijn ervaringen met de leidingen in het gazon en naar aanleiding van de bovenstaande overwegingen wilde ik proberen om een methode te vinden die (bijna) altijd en overal werkt. Dus ook in die gevallen waarin een robotmaaier geen signalen met steile flanken gebruikt die door een radio kunnen worden opgepikt. Of waar voor andere doeleinden (bijvoorbeeld voor een lamp) een stroomkabel in de grond zit die zomaar een ontmoeting met een spade of een motorfrees kan hebben. Voor al die gevallen waarin een kabelonderbreking moet worden gevonden is er dus elektronica nodig die een signaal opwekt dat door een passende ontvanger kan worden gedetecteerd.
Het is niet moeilijk om zoiets te bouwen, maar eerst moeten we vaststellen wat de eisen zijn. Het is duidelijk dat hogere frequenties door de grond (of door muren) sterker worden verzwakt dan lagere. En omdat radio’s kant en klaar te koop zijn, spaar je daarmee de zelfbouw van een ontvanger al uit. In het ideale geval betekent dit de aanschaf van een radio met langegolfbereik. Dat in Duitsland, net als in sommige andere Europese landen, binnenkort geen radio’s meer mogen worden verkocht die alleen analoge signalen kunnen ontvangen is geen probleem, want de geïntegreerde digitale ontvanger van nieuwere radio’s hindert de ontvangst niet. En daarnaast hebben we altijd nog eBay. Daar heb ik mijn ‘eigen’ langegolfradio (figuur 8) voor weinig geld op de kop getikt – en dat kunt u ook, als u niet nog ergens zo’n ding hebt staan. Overigens hoeft het niet absoluut een radio met langegolfbereik te zijn. Met alleen middengolf lukt het in het algemeen ook, als de flanken van het te detecteren signaal maar steil genoeg zijn. Gewoon uitproberen dus...

Signaalinjector
Een amplitudegemoduleerd signaal voor ontvangst met een langegolfradio is snel te realiseren. Dat kan natuurlijk met een van de populaire microcontrollers en een paar regels code. Maar als we toch met analoge techniek te maken hebben, heeft een analoge schakeling uiteraard de voorkeur. Hoe zat het ook alweer met hét IC aller IC’s, de 555-timer?
In principe kan deze hiervoor worden gebruikt, maar als u een amplitudegemoduleerd signaal wilt, dan zijn er twee timer-IC’s nodig – een voor het LF-signaal en een voor het HF-signaal. En zoiets bestaat in één behuizing: de 556, een dubbele 555. Dit zou een eenvoudige oplossing zijn, maar een gewone 555 heeft, net als zijn dubbele collega 556, het nadeel dat hij een voedingsspanning van 5 V nodig heeft en ook nog behoorlijk wat stroom trekt. En dat is weer niet geschikt voor batterijvoeding. Maar gelukkig bestaat de 556 ook in CMOS-uitvoering: deTLC556. Deze werkt al prima vanaf 2 V en kan dus heel goed uit twee AA- of AAA-batterijen of een lithium-knoopcel type CR3032 worden gevoed.
Daarom is dit IC gebruikt voor de schakeling van de universele signaalinjector (figuur 9). Met R1 en C2 genereert timer 1 (IC1A) een symmetrische blokgolf van 465 Hz, ongeveer een halve toon boven de stemtoon-a. Hiermee wordt via de reset-ingang van IC2A een met 465 Hz in amplitude gemoduleerde en door R2 en C4 bepaalde 185-kHz-blokgolf opgewekt. Met P1 kan de amplitude van het in de leiding geïnjecteerde signaal zodanig worden ingesteld dat het juist met de radio kan worden ontvangen. R3 dient alleen als kortsluitbeveiliging.
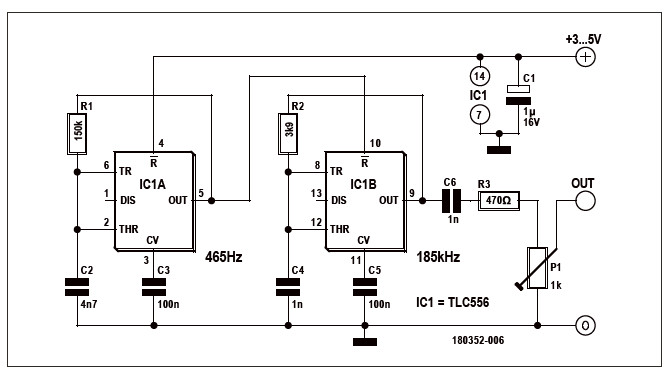
De waarden van de onderdelen hoeven niet strikt te worden aangehouden. De derde of vijfde harmonische van timer 2 zou nog genoeg amplitude moeten hebben om van dichtbij met een middengolfontvanger te kunnen worden ontvangen. Wie de pech heeft om in de buurt van een sterke zender rond 185 kHz te wonen kan met R2 eenvoudig andere frequenties realiseren. Hierbij geldt: f = 0,725 / (R2 x C4).
(180352-03)
----------------------------------------------------------------------------------------------------------------------------------------------------
Wilt u meer van die fantastische Elektor-artikelen?
--> Neem vandaag nog een abonnement op Elektorlabs - u mist nooit meer een artikel, project of handleiding!
----------------------------------------------------------------------------------------------------------------------------------------------------
Discussie (0 opmerking(en))