
Magnetische levitatie “the easy way”
op

Op de pagina’s van Elektor Labs zijn twee magnetische levitatieprojecten van ontwerper Peter Neufeld te vinden. In beide gevallen zweeft een Lego-poppetje in de lucht. En ze werken allebei op dezelfde manier: de sterkte van het magnetische veld tussen een elektromagneet en een neodymium-magneet wordt gemeten met een Hall-sensor en op basis van het meetresultaat wordt de elektromagneet aangestuurd. Het verschil tussen de twee projecten zit hem in de stuurschakeling. Het eerste is ‘hardware only’ en werkt met een analoge comparator, terwijl het tweede werkt met een M5Stack Atom ESP32 Pico-microcontrollermodule. In dit artikel bekijken we de eerste oplossing.
Op Wikipedia wordt levitatie omschreven als “het proces waarmee een object zwevend op zijn plaats wordt gehouden zonder mechanische ondersteuning”. Dat wordt bereikt door een opwaartse kracht op het object uit te oefenen, die even groot is als de zwaartekracht die erop werkt. Elektromagnetische kracht is één van de mogelijkheden om een elektronisch levitatieproject te maken. In theorie zou een constructie die bestaat uit twee permanente magneten volstaan, maar in de echte wereld zijn er altijd verstorende invloeden die het instabiele evenwicht verstoren, daarom worden elektromagneten gebruikt. Met een regelcircuit kunnen we de sterkte van het magnetische veld variëren om het object op zijn plaats te houden. Daar is natuurlijk een terugkoppeling van de positie van het object voor nodig. In de twee projecten op de Elektor Labs-pagina’s wordt een Hall-sensor gebruikt voor het meten van de sterkte van het magnetische veld tussen een elektromagneet (die in een frame is bevestigd) en een permanente magneet die eronder “zweeft”. De uitgangsspanning van de sensor wordt gebruikte als een maat voor de afstand tussen de magneten. Bij de term “regelcircuit” denken we vaak aan omslachtig, ingewikkeld rekenwerk en dus ingewikkelde schakelingen, maar Peter Neufeld’s projecten tonen aan dat het niet zo complex hoeft te zijn.
Levitatieprojecten trekken altijd de aandacht. Het is altijd fascinerend om een object te zien zweven. Het ziet er magisch uit, alsof de wetten van zwaartekracht niet gelden voor het zwevende object. Natuurlijk is dat niet waar. Ik was echt verbaasd wat je kunt doen met zo’n klein stukje elektronica. De meeste magnetische levitatieprojecten die ik eerder had gezien, leken me veel moeilijker te bouwen, vaak met zelfgemaakte spoelen en grote stromen. Maar Peter’s video’s toonden aan dat het mogelijk was, al zegt hij erbij dat er wel wat nauwkeurigheid en behendigheid aan te pas komt om de kalibratie goed te krijgen. Er is één manier om er achter te komen: we gaan het gewoon proberen!
Dit artikel gaat over één van de projecten, het draagt de titel “easy way”, en het werkt met een analoge comparator voor het aansturen van de elektromagneet. We willen vooral beschrijven hoe de levitatie werkt. In een toekomstig artikel willen we ook ingaan op de versie met de M5Stack Atom ESP32 Pico. Dan gaan we meer aandacht besteden aan het uiterlijk van zo’n project.
Hardware voor de analoge versie
Uit het schema van figuur 1 blijkt dat we maar heel eenvoudige hardware nodig hebben om dit project te bouwen.
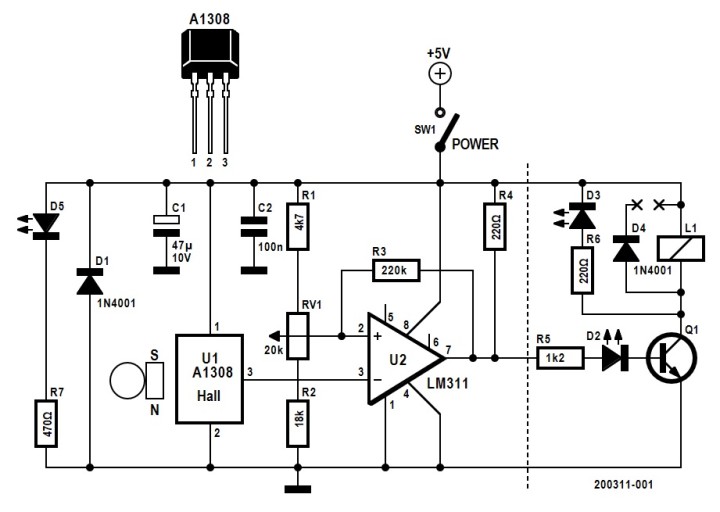
L1 stelt een relaisspoel voor, waarvan de schakelcontacten zijn verwijderd. Het is een deel van een standaard relaiskaart (die we zometeen zullen beschrijven). Hij is bevestigd aan een frame en de spoelkern is omlaag gericht. Het zwevende object (met een permanente magneet) komt daar onder te “hangen”. R6 en LED3 vervangen de vrijloopdiode D4 op de print en dienen als optische indicator bij het kalibreren van de schakeling. Hall-sensor U1 is op de spoelkern gemonteerd en meet het magnetische veld tussen L1 en het zwevende object, de output is verbonden met de inverterende input van comparator U2, een LM311. De niet-inverterende input van U2 is verbonden met de loper van instelpotmeter RV1, die wordt gebruikt voor het afregelen van de stuurschakeling. R3 zorgt voor een kleine hysterese in de comparator. De output van de comparator schakelt de spoel in, wanneer spanning op de output van de Hall-sensor lager is dan het ingestelde niveau op de loper van RV1.
LED D5 is de voedingsspanningsindicator en SW1 is de aan/uit-schakelaar. D1 is een zogenaamde crowbar-diode die de schakeling beschermt als de voedingsspanning verkeerd-om wordt aangesloten.
Hoe komen we aan de (juiste) componenten?
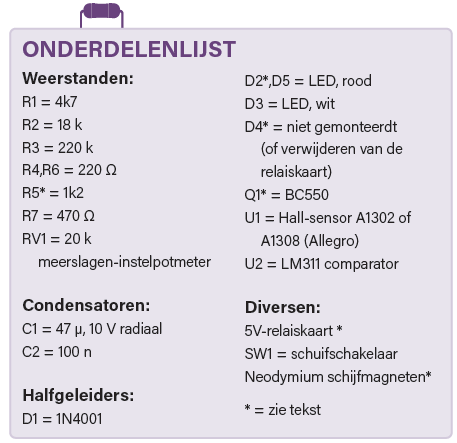
De meeste elektronische en mechanische onderdelen zijn goed verkrijgbaar, alleen de Hall-sensor (A1302 of A1308) van Allegro is wat lastiger. Maar goedkopere en gemakkelijker verkrijgbare sensoren zoals de SS49 bleken niet te werken in de vroege prototypen van Peter’s levitatieprojecten, waarschijnlijk omdat het uitgangssignaal niet snel genoeg reageert als het magnetische veld verandert, maar dat is niet verder onderzocht.
Het lastigste bleek nog het vinden van de relaiskaart die we gebruiken voor de elektromagneet. Deze modules zijn gewoon te koop op het internet in allerlei webwinkels voor maker en Arduino-hobbyist, dus ze zouden toch niet moeilijk te vinden moeten zijn. Peter had getest met relaiskaarten van de typen HW-482 met JQC-3FF-S-Z- en JQC3F-05VDC-relais. Maar ik leerde (opnieuw) dat je moet oppassen met inkopen via Internet. Vertrouw nooit de foto’s die je ziet in webshops! Ik had gekeken naar de foto’s van de ontwerper en vond exact dezelfde kaart bij Amazon. Maar ik kreeg modules van het type HW-307 met een relais met typenummer FL-3FF-S-Z. Ze werkten zoals beschreven en beloofd in de winkel: een 5V-relais met een enkelvoudig wisselcontact, een drivertransistor, een vrijloopdiode en een indicatie-LED. Maar de transistor op mijn kaart was een PNP-type, terwijl op de kaarten waar Peter mee had getest een NPN-transistor zat. Ik heb het toch maar geprobeerd, want het relais was dan wel van een ander merk, maar het zag er precies eender uit, ook aan de binnenkant. Het ging tenslotte vooral om de spoel en de kern.
Voor de magneten gebruiken we een stapel van twee of drie schijfvormige neodymiummagneten met een diameter van 8 tot 12 mm en een dikte van 2 tot 3 mm. De grootte en aantal magneten dat nodig is, zal ook afhangen van het gewicht van het Lego-poppetje of ander voorwerp dat u wilt laten zweven. Ik begon met twee magneten met een diameter van 10 mm en een dikte van 2 mm. Het is aan te raden om met een eenvoudig object te beginnen om het afregelen in de vingers te krijgen. Het is ook een goed idee om de bovenkant te markeren met een markeerstift om te voorkomen dat u de magneten ondersteboven hangt. Als het met de losse magneten werkt, kunt u er dingen aan gaan hangen. Natuurlijk zijn er grenzen aan de grootte en het gewicht van het voorwerp dat u kunt laten zweven. Als we het in dit artikel hebben over “de magneten”, bedoelen we dus het hele voorwerp, inclusief de magneten.
De opbouw
Er is geen printontwerp voor dit project, maar het is gemakkelijk te bouwen op een stukje gaatjesprint of zelfs op een breadboard. In figuur 2 ziet u de constructie van het prototype.
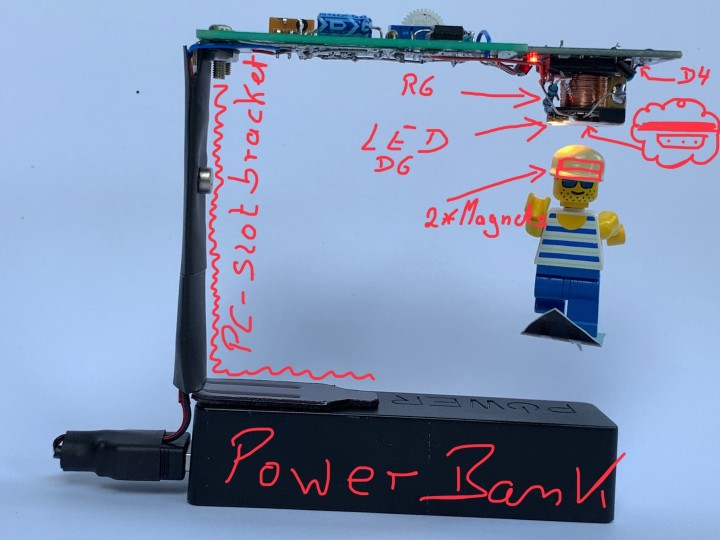
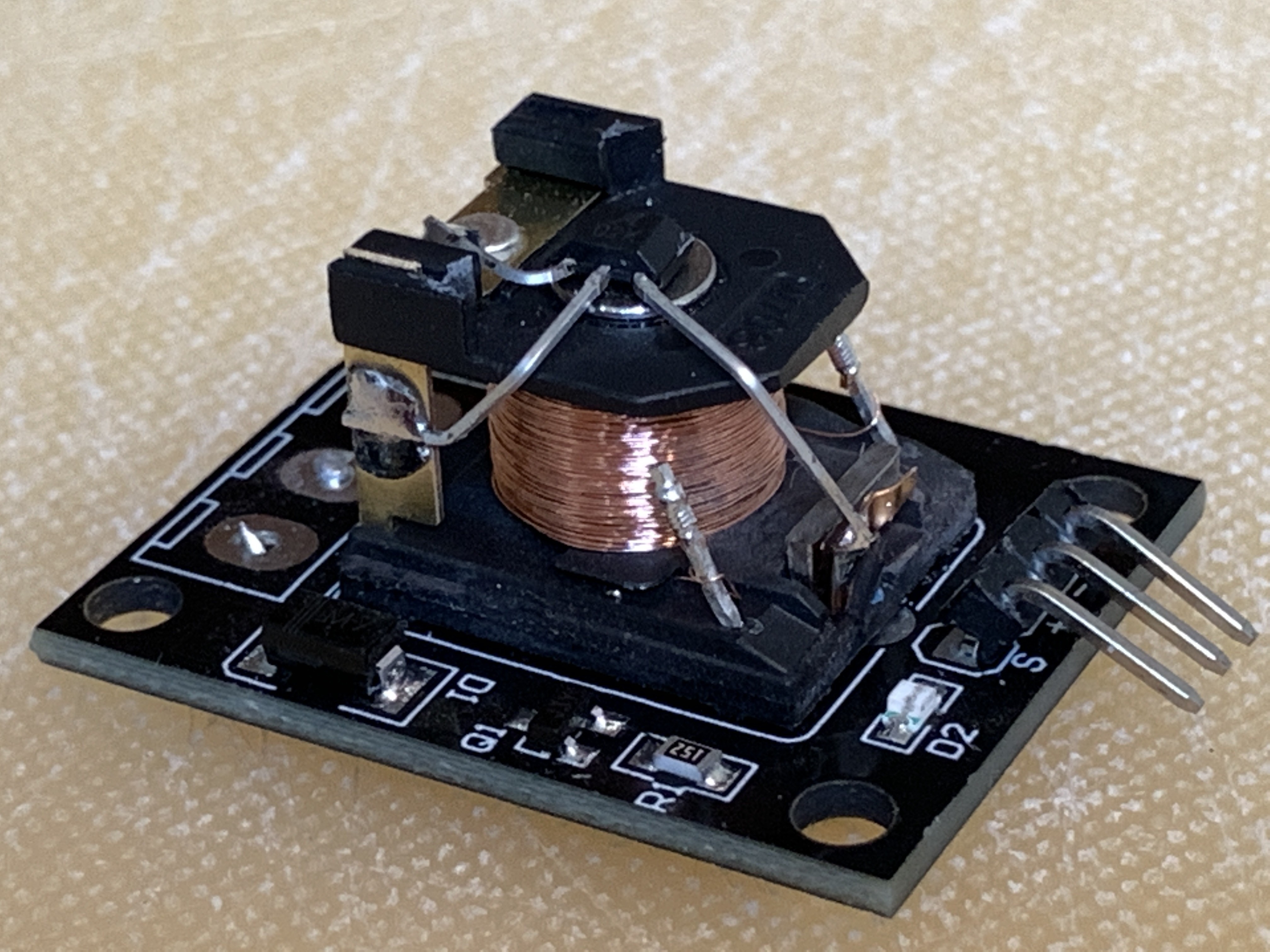
Begin met het verwijderen van de 3-polige printkroonsteen van de relaiskaart, zodat u meer ruimte hebt om aan het relais te werken. Kijk goed naar Peter’s foto’s in figuur 3 om te zien wat u met het relais moet doen: verwijder de behuizing en het grootste deel van het schakelmechanisme, we gebruiken alleen de spoel en de kern. Kort de U-vormige kern in tot de vorm van een J, om te voorkomen dat het veld wordt kortgesloten. Een kleine slijpschijf op een Dremel kan handig zijn om de metalen delen af te slijpen.
Wat voor relaiskaart u ook hebt, de vrijloopdiode D4 voor het relais moet worden verwijderd en vervangen door R6 en de witte LED D3. Bij Peter’s relaiskaart was de schakeling uit figuur 1 daarmee compleet, inclusief Q1, R5 en D2 die al op de print zitten. Zelf heb ik alleen de relaisspoel behouden, alle andere componenten heb ik verwijderd en dit deel van de schakeling zelf opgebouwd. Voor Q1 kan een BC550 of een andere standaard NPN-transistor worden gebruikt. Achteraf bekeken zou het voor mij handiger geweest zijn om alleen het relais te kopen, maar deze kleine, in serie vervaardigde relaismodules zijn misschien wel goedkoper dan losse relais.
Let op: de nummers van de componenten op de relaiskaart in het schema (L1, R5, D2 Q1 en D4) komen niet overeen met de nummers op de print. Het zal niet zo moeilijk zijn de vrijloopdiode D4 te vinden die u moet verwijderen.
De Hall-sensor wordt rechtstreeks op de kern van de spoel gemonteerd. Plaats hem parallel aan het oppervlak van de kern, zoals in figuur 4. Lijm een stukje plastic over de sensor en de aansluit pennen om kortsluiting te voorkomen als de magneet tegen de kern aan wordt getrokken.
Het bouwen van de rest van de schakeling op gaatjesprint zal weinig moeilijkheden opleveren. Let er wel op dat de bedrading van de spoel en oriëntatie van de permanente magneet en de Hall-sensor heel belangrijk zijn voor de goede werking:
- Als de permanente magneet dichter bij de spoel en Hall-sensor komt, moet de uitgangsspanning van de sensor toenemen.
- Als de spoel wordt ingeschakeld, moet zijn magnetisch veld de magneet aantrekken.
Als aan één (of beide) voorwaarden niet wordt voldaan, zal het niet werken. De eerste voorwaarde is gemakkelijk te controleren door de uitgangsspanning van de Hall-sensor te meten met een multimeter; draai de magneet gewoon om als de spanning afneemt wanneer hij de sensor nadert. En de tweede… ik kon de kracht tussen de bekrachtigde spoel en de magneet voelen, dat leek in orde te zijn.
En het leek alsof de stuurschakeling die ik had gebouwd goed werkte, want beide LED’s gingen op de juiste momenten aan: D2 licht op, wanneer de spoel is ingeschakeld, D3 flitst wanneer de spoel wordt uitgeschakeld, als de magneet dicht bij de spoel kwam. Dan zou ik alleen nog maar RV1 hoeven af te regelen om de juiste spanning op de niet-inverterende input van de comparator te zetten zodat mijn Lego-poppetje met aangehechte magneet zou gaan zweven, zoals in de video. Maar mijn inspanning werd niet beloond: de magneet knalde tegen de spoel of hij viel op de tafel.
Toen dacht ik weer aan de tweede voorwaarde. Ik voelde echt dat de magneet, als ik hem vasthield, door de spoel werd aangetrokken als die bekrachtigd werd. Dan was dat ook in orde. Toch?
Als niets meer helpt... lees je de gebruiksaanwijzing
Eerst heb ik de sterkte van het magnetische veld van de spoel getest. Tot mijn verbazing bleek de elektromagnetische kracht maar heel klein te zijn: rechtstreeks gevoed met 5 V kon hij amper een heel klein ijzeren voorwerpje optillen. Niet bepaald de kracht die je zou verwachten om wat dan ook mee op te tillen, laat staan een zware magneet met een voorwerp eraan. Maar ik had iets belangrijks over het hoofd gezien: ook als de spoel helemaal niet wordt gevoed, is er altijd nog het veld van de permanente magneet. Dat levert veel meer kracht op dan het zwakke veld van de spoel. Dus zo zit het: als de permanente magneet dicht bij de kern komt, dan is er een positie waar de statische kracht net niet sterk genoeg is om de magneet tegen de kern te trekken. En dan gaat het veld van een spoel een rol spelen. De spoel voegt maar een kleine kracht toe aan het statische veld, net sterk genoeg om de magneet omhoog te trekken. Het magnetische veld dat de Hall-sensor meet neemt toe (en dus ook zijn uitgangsspanning) als de magneet dichterbij de kern komt. Dan schakelt de regelaar de spoel uit (mits RV1 correct is ingesteld), waardoor de magneet net niet helemaal tegen de kern getrokken wordt. Dan trekt de zwaartekracht de magneet weer omlaag, waardoor het veld zwakker wordt en schakelt de spoel weer in, enzovoort.
Omdat het elektromagnetische veld heel zwak is in vergelijking met het statische magnetische veld, is het moeilijk om te bepalen of de spoel aantrekt of afstoot als er een stroom door loopt. Ik heb een ouderwets kompas gebruikt om te controleren of de richting van het elektromagnetische veld correct was om te voldoen aan de tweede voorwaarde voor het zweven. Toen ik Peter’s documentatie opnieuw doorlas, zag ik dat hij een eenvoudige oplossing noemt om de juiste oriëntatie van de spoel te vinden: de uitgangsspanning van de Hall-sensor neemt niet alleen toe wanneer de permanente magneet dichterbij komt, maar ook wanneer de spoel wordt gevoed (bijvoorbeeld door de collector van Q1 met GND te verbinden). Als dat niet klopt, kunt u de aansluitingen van de spoel en van LED D3 omwisselen.
Afregelen
Zoals al eerder vermeld, komt er nauwkeurigheid en behendigheid aan te pas om het punt te vinden waar de last blijft zweven, ergens tussen 10 mm en 15 mm onder de spoel. Peter beschrijft een werkwijze om met behulp van een stapel van gele post-it briefjes de afstand goed te krijgen voor kalibratie, maar dat lukte mij niet (het zal wel aan mijn onhandigheid gelegen hebben). Het lukte me wel om de magneet op mijn hand te zetten en hem dan heel langzaam omhoog te brengen naar de spoel totdat ik kon voelen dat de magnetische kracht begon te trekken. Als de spoel wordt uitgeschakeld, voordat dat punt is bereikt, verdraai dan RV1 voor een hogere drempelspanning op de niet-inverterende input van de comparator. Of draai de potmeter naar een lager niveau als de spoel niet wordt uitgeschakeld, voordat de magneet tegen de kern aan komt. De witte LED licht kort op wanneer de spoel wordt uitgeschakeld. Draai de potentiometer naar het punt waar deze LED continu lijkt op te lichten (in werkelijkheid knippert hij met de regelfrequentie van de magneet). In het begin zal de magneet vaak tegen de kern getrokken worden, maar als u er wat behendigheid in krijgt, zult u merken dat het steeds gemakkelijker wordt om de kalibratie goed te krijgen voor andere voorwerpen. Bij mijn testopstelling kon ik zelfs het schakelen van de besturingsschakeling horen als de instelling (bijna) goed was. Inderdaad, het kan even duren, voordat het lukt, maar het is te doen!
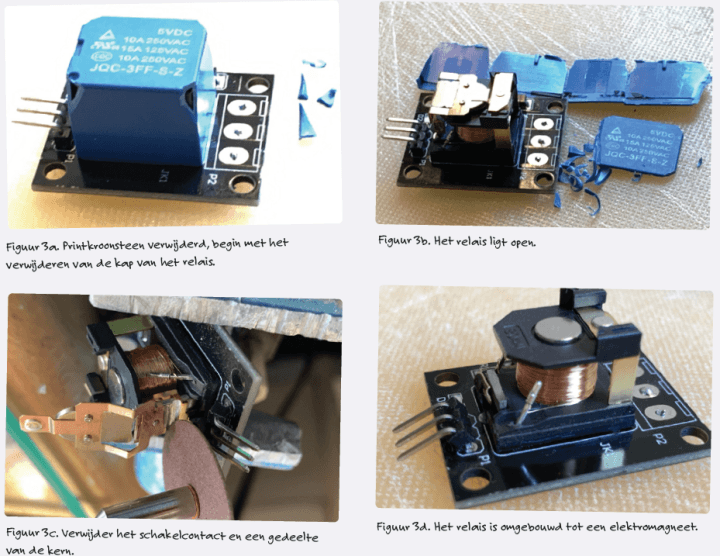
Ik wilde eerst een prototype bouwen dat er net zo mooi uitzag als dat van de auteur, maar na alle veranderingen die ik had aangebracht voordat het eindelijk werkte, is dat erbij ingeschoten. Mijn opstelling zag er uiteindelijk zo uit als in figuur 5.
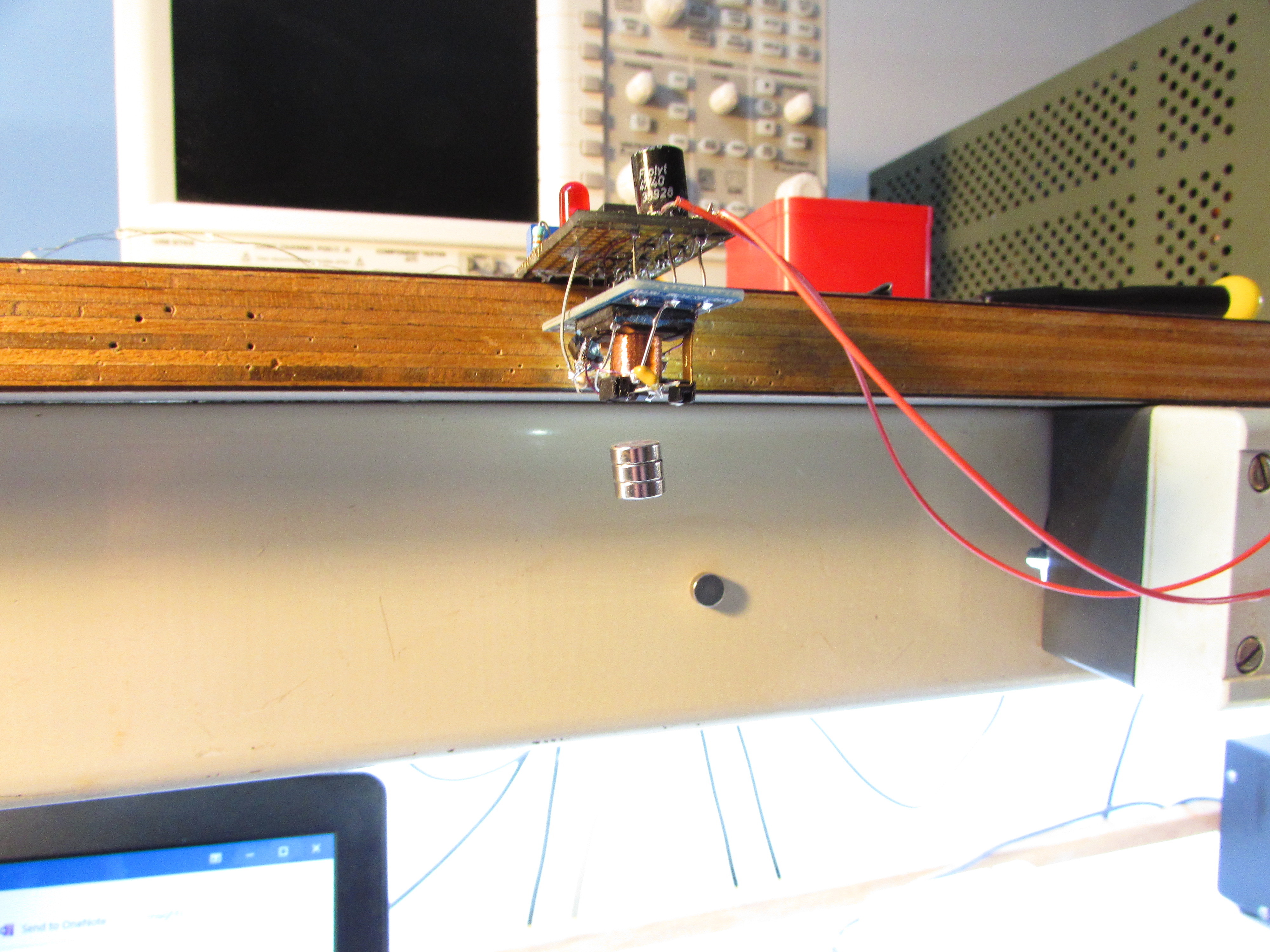
Maar ik had in elk geval mijn belangrijkste doel bereikt: ik had de magnetische levitatie aan de praat gekregen! En misschien ooit, als ik geen ideeën meer heb om aan te werken... Maar ik ga meer aan het uiterlijk doen bij het tweede deel dat zal gaan over dat andere levitatieproject dat Peter Neufeld heeft ontworpen, de digitale oplossing. Na alles wat ik heb geleerd van dit “simpele” analoge ontwerp, zal ik de meeste valkuilen die ik ben tegengekomen bij de analoge versie kunnen vermijden. Het tweede project wordt dan gemakkelijker, zodat ik meer tijd aan de “cosmetische” aspecten kan besteden!
(200311-03)
Een bijdrage van
Ontwerp: Peter NeufeldTekst en redactie: Luc Lemmens
Discussie (2 opmerking(en))