
Softstart voor versterkers
op
Auteur: Klaus-Peter Westrup (Duitsland)
Bij voedingen met een nettrafo wordt de inschakel-piekstroom veroorzaakt door de magnetische kernverzadiging; bij schakelende voedingen wordt deze daarentegen veroorzaakt door de ontladen tussenkringcondensator.
Omdat die piekstroom zeer groot is, vormt hij voor veel onderdelen een enorme belasting. Het wekt daarom geen verbazing dat apparaten en/of de voedingsschakelingen daarvan bijna altijd op het moment van inschakelen kapot gaan – net als het overlijden van een ouderwetse (en inmiddels verboden) gloeilamp op het moment dat we de schakelaar omzetten.
 Fabrikanten van elektrische en elektronische apparatuur (en lezers van Elektorlabs) kennen dit verschijnsel maar al te goed. En de remedie is ook bekend: op een of andere manier moet de inschakelstroom begrensd worden.
Fabrikanten van elektrische en elektronische apparatuur (en lezers van Elektorlabs) kennen dit verschijnsel maar al te goed. En de remedie is ook bekend: op een of andere manier moet de inschakelstroom begrensd worden.
Inschakelen van een nettrafo
Hoe hoger de inductie in de ijzerkern van de transformator en hoe kleiner de luchtspleet en hoe kleiner de koperverliezen, des te groter is de inschakel-stroompiek. In tegenstelling tot wat u wellicht denkt, is die piekstroom het grootste wanneer de netspanning precies op het moment van de nuldoorgang wordt ingeschakeld.
Waarom dat zo is, kunnen we met een beetje wiskunde beredeneren. In ingeschakelde toestand, en nadat alle inschakelverschijnselen achter de rug zijn, bedraagt de faseverschuiving tussen de netspanning en de magnetische flux 90°, zoals beschreven door
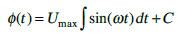
Deze vergelijking is afgeleid uit de Wet van Faraday. Hieruit volgt:

De magnetische flux bereikt dus bij de nuldoorgang van de netwisselspanning zijn negatieve maximum. Bij continubedrijf van de trafo is de constante C gelijk aan nul.
Op het moment van inschakelen is dat echter niet het geval, omdat de magnetische flux bij nul moet beginnen (vooropgesteld dat de ijzerkern geen restmagnetisme bezit). Wanneer we dus de trafo op het tijdstip t = 0 inschakelen, wordt de startconditie van de magnetische flux door de constante C gedefinieerd, en die constante is zelf weer afhankelijk van
- de waarde en polariteit van het restmagnetisme van de ijzerkern
- de fase van de aangelegde wisselspanning
- de eigenschappen van het kernmateriaal
Samenvattend kunnen we schrijven:

Wanneer we aannemen dat φrest = 0, dan vinden we:
- wanneer we de netspanning inschakelen op het moment dat deze maximaal is: φ = φmax
- maar wanneer we op de nuldoorgang inschakelen: φ = 2·φmax
Deze tweemaal zo grote magnetische flux stuurt de trafokern in (magnetische) verzadiging, waardoor de zelfinductie van de spoel vrijwel naar nul gaat zodat de stroom uitsluitend door de ohmse weerstand van de wikkeling en van het netsnoer wordt begrensd.
De inschakel-stroompiek duurt maximaal zo’n 10 ms. In de praktijk kunnen we rekenen met een tijdsduur van 3...6 ms omdat de kern niet abrupt in verzadiging gaat maar daar enige tijd voor nodig heeft. We mogen echter niet vergeten dat het nog ongeveer 4...10 perioden van de netwisselspanning duurt voordat de magnetische flux en dus ook de spoelstroom hun stationaire waarden hebben aangenomen.
Mogelijke oplossingen
Om het probleem van grote inschakelstroompieken te omzeilen, zou men bijvoorbeeld op de een of andere manier kunnen proberen de trafo uitsluitend in te schakelen op het moment dat de netspanning zijn topwaarde heeft bereikt – dan vermijden we die vermaledijde inschakelpiek.
Dat is op zich helemaal correct, maar om dit goed te laten functioneren moet het restmagnetisme van de kern op het inschakeltijdstip altijd nul zijn, en dat is iets wat in de praktijk niet gegarandeerd kan worden. Er bestaan echter schakelingen die dit restmagnetisme meten en het dan zonder stroombegrenzende weerstanden kunnen stellen. Deze schakelingen zijn echter behoorlijk gecompliceerd.
Een andere mogelijkheid is de transformator zo te dimensioneren dat die niet zo snel in verzadiging gaat. Dat functioneert ook, maar leidt tot hogere kosten en grotere elektrische verliezen, terwijl bovendien de afmetingen van de trafo toenemen, wat in de meeste gevallen ongewenst zal zijn.
Uit praktische overwegingen laten we de inschakel-stroompiek dus voor wat die is (omdat die de trafo vanwege de korte duur niet beschadigt – wanneer we niet over extreme vermogens spreken) en lossen we het probleem met een inschakelstroombegrenzing op. Zoals we nog zullen zien, kan die zowel passief als actief worden uitgevoerd.
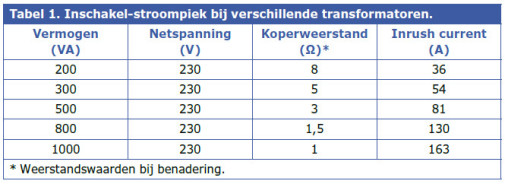
Tabel 1 geeft een indruk van de inschakelstromen die bij meer of minder zware trafo’s optreden. Het moge duidelijk zijn dat vanaf vermogens van zo’n 300 VA een inschakelstroombegrenzing nodig is om te voorkomen dat ‘de stoppen ons om de oren vliegen’ om het maar eens zo uit te drukken.
Passieve inschakelstroombegrenzing
Voor passieve inschakelstroombegrenzing worden doorgaans ‘dikke’ serieweerstanden of thermistoren gebruikt. Thermistoren – wat zijn dat nou weer voor dingen? Geen angst – dat zijn gewoon weerstanden waarvan de weerstandswaarde afhankelijk is van de temperatuur. We kennen die allemaal als NTC- en PTC-weerstanden.
Wanneer het om de begrenzing van inschakelstromen gaat, komen uiteraard alleen NTC-weerstanden in aanmerking, weerstanden met een negatieve temperatuurcoëfficiënt. Die hebben in koude toestand een hogere weerstand dan in warme toestand.
Bij een zuiver passieve inschakelstroombegrenzing staat die thermistor in serie met de belasting. In uitgeschakelde toestand (zeg maar: bij kamertemperatuur) is de weerstand dusdanig dat de inschakelstroom tot een veilige, hanteerbare waarde wordt begrensd. Ten gevolge van de stroom door de thermistor wordt die warmer (er wordt immers vermogen in gedissipeerd) en neemt zijn weerstand af tot uiteindelijk niet meer dan een paar ohm en bereikt de stroom zijn nominale (stationaire) waarde. Deze oplossing met thermistoren wordt algemeen als betrouwbaar en goedkoop beschouwd.
Belangrijke parameters bij de keuze van de thermistor zijn de beginweerstand (in ‘koude’ toestand) en de stroombelastbaarheid. De waarde van de weerstand dient zo te worden gekozen dat hij de stroom door de belasting tot een waarde begrenst die de zekering nog niet doet aanspreken (en die de belasting niet kan beschadigen).
Hieronder gaan we voor de dimensionering uit van een 500VA-transformator, die door een in het betreffende apparaat aanwezige apparaatzekering met Ismax = 10 A is afgezekerd.
We berekenen de koude weerstand van de thermistor met:

De koude weerstand van onze thermistor dient dus 30 Ω te bedragen. Nu moeten we de stroom berekenen die in stationait (continu) bedrijf door de thermistor loopt (we veronderstellen dat de transformator maximaal wordt belast):

We komen bij onze 500VA-trafo dus uit op 2,2 A.
Tenslotte moeten we nog inschatten wat de maximale hoeveelheid energie is die de thermistor direct na het inschakelen in warmte moet omzetten. Wanneer we veronderstellen dat de inschakelpuls bij benadering blokvormig is, dan correspondeert het product ‘vermogen maal tijd’ de gezochte hoeveelheid energie. We vinden:

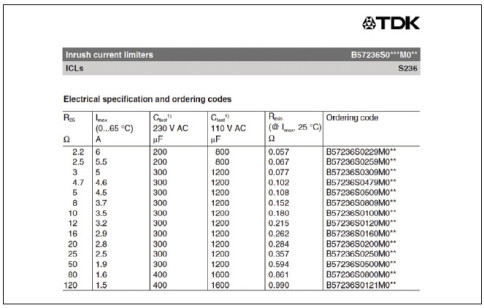
In het datablad van de S236-thermistoren van TDK (zie figuur 1) wordt die maximaal toelaatbare energie niet als zodanig genoemd. In plaats daarvan vinden we een maximaal toelaatbare belastingscapaciteit Ctest die op de thermistor voor stroombegrenzing mag worden aangesloten. Bij schakelende voedingen mogen we hiervoor de waarde van de tussenkringcondensator nemen. We berekenen dan

De belastbaarheid van een enkele thermistor is niet groot genoeg; we moeten dan uitwijken naar een ‘zwaarder’ exemplaar, of twee thermistoren in serie schakelen (opmerking: thermistoren mogen niet parallel worden geschakeld). We hebben hier voor die laatste mogelijkheid gekozen: twee stuks 16Ω-thermistoren in serie.
Nadelen
Hoewel we deze passieve inschakelstroombegrenzing vaak in consumentenelektronica aantreffen, zijn er enkele nadelen aan verbonden.
In de eerste plaats: hoewel de warme weerstand van de thermistor nog slechts 1/20 tot 1/10 van de koude weerstand bedraagt, wordt er toch een aanzienlijk vermogen in gedissipeerd, in ons geval minimaal ongeveer 8 W, en dat is vanzelfsprekend alleen al om milieuredenen onwenselijk. Bovendien wordt de thermistor warm: bij nominale belasting neemt diens temperatuur toe tot (in ons geval) maar liefst 150 °C.
Dat betekent dat we het apparaat in kwestie niet meteen na uitschakelen weer mogen inschakelen: de thermistor heeft al gauw een minuut of langer nodig om zover af te koelen dat hij zijn begrenzingsfunctie weer kan waarnemen.
Ook krijgen onderdelen en soldeerverbindingen in de directe omgeving met deze warmte-ontwikkeling te maken; vooral kunststof delen moeten op voldoend grote afstand van de thermistor(en) gemonteerd worden.
Een relais brengt uitkomst
In figuur 2 hebben we een veelgebruikte (actieve) oplossing voor dit dissipatieprobleem geschetst. We zien hier een netvoeding met voorgeschakelde thermistor. Parallel aan die thermistor staat een relaiscontact dat korte tijd na inschakelen wordt gesloten. De thermistor is dan overbrugd zodat er geen vermogen meer in wordt gedissipeerd. Natuurlijk gaat er in het relais ook enig vermogen verloren (ongeveer 1 W) maar dat is veel minder dan de minimaal 8 W bij de uitvoering zonder relais.
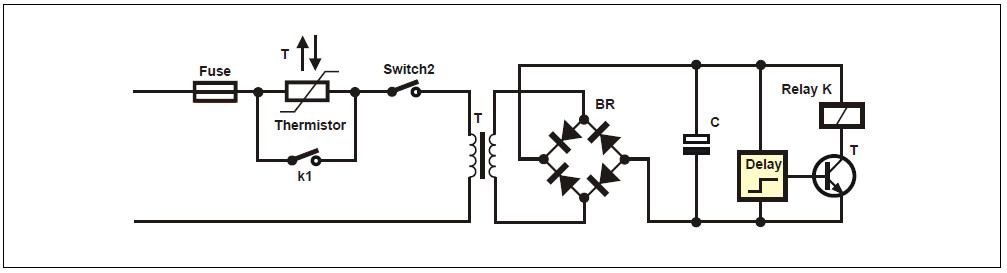
Vaak wordt de inschakelelektronica uit een kleine hulptrafo gevoed. Deze ontkoppelt de inschakel-elektronica van de apparaatvoeding, zodat ook een korte stroomonderbreking tot een veilige reset van de inschakelelektronica leidt. Een ander voordeel van deze opzet is dat de vermogens-netschakelaar van het apparaat via een tweede relais door een laagspanningsschakelaar kan worden vervangen.
En dan nu de praktijk
Na al deze (hopelijk toch wel interessante) theoretische overwegingen wordt het tijd de handen uit de mouwen te steken. De softstartschakeling uit dit artikel is oorspronkelijk ontworpen voor een audio-eindversterker met een schakelende voeding. Toegegeven, de meningen over het gebruik van schakelende voedingen in audioversterkers zijn verdeeld, maar een schakelende voeding heeft ten opzichte van een klassieke lineaire voeding met ringkerntrafo enkele zwaarwegende voordelen. Aan de ene kant is het rendement hoger dan bij een lineaire voeding, en aan de andere kant kunnen dankzij de geringere afmetingen kleinere en lichtere eindversterkers worden gebouwd, die bovendien gemakkelijk in een luidsprekerbox kunnen worden ingebouwd. Een ander voordeel is dat de uitgangsspanning geregeld is, zodat een veilige maximale waarde van de uitgangsspanning ook bij wisselende belasting niet over- of onderschreden wordt. En wanneer de topologie van de regelaar juist wordt gekozen, is het mogelijk een uiterst ‘schone’ voedingsspanning te verkrijgen.
Voor audiotoepassingen worden inmiddels speciale schakelende voedingen ontwikkeld.
Blokschema
Alle overwegingen hebben uiteindelijk geleid tot een softstart-unit die door een microcontroller wordt gestuurd. Zo’n microcontroller biedt een uitgelezen mogelijkheid om zonder al te veel hardware-omhaal een aantal uitbreidingen te realiseren zoals een audio-getriggerde autostart-functie, die de versterker uitschakelt wanneer gedurende enige tijd geen audiosignaal aanligt, en die de versterker automatisch inschakelt zodra een audiosignaal voorhanden is. Ook is een IR-ontvanger ingebouwd waarmee (via een motorpotmeter) het volume geregeld kan worden. Figuur 3 toont het blokschema van de uiteindelijke schakeling.

Het hart van de schakeling wordt gevormd door de microcontroller – en hoewel die prominent aanwezig is, kon in de praktijk worden volstaan met een relatief bescheiden ATTiny44. De netspanning komt van links binnen en voedt de softstart-unit via een eigen kleine trafo. Tegelijk gaat die netspanning via een relais/thermistor-schakeling naar de eigenlijke (schakelende) voeding van de versterker rechtsboven.
Deze levert de voedingsspanningen V1+ en V1– voor de versterker, die nog eens extra via relais/thermistor-combinaties zijn beveiligd. Hieruit worden op conventionele wijze de spanningen V2+ en V2– afgeleid waarmee een voorversterker kan worden gevoed. Daarnaast levert de voeding nog een hulpspanning die wordt gebruikt voor de aansturing van de motorpotmeter.
Het uitgewerkte schema...
...is getekend in figuur 4. De diverse componenten van het blokschema zijn zonder veel moeite te herkennen. Linksboven (K9, K1 en K11) is het netspanningsdeel. Op K1 wordt de netspanning voor de voeding van de softstart-unit zelf aangesloten. De geschakelde netspanning voor de schakelende voeding loopt via K11.
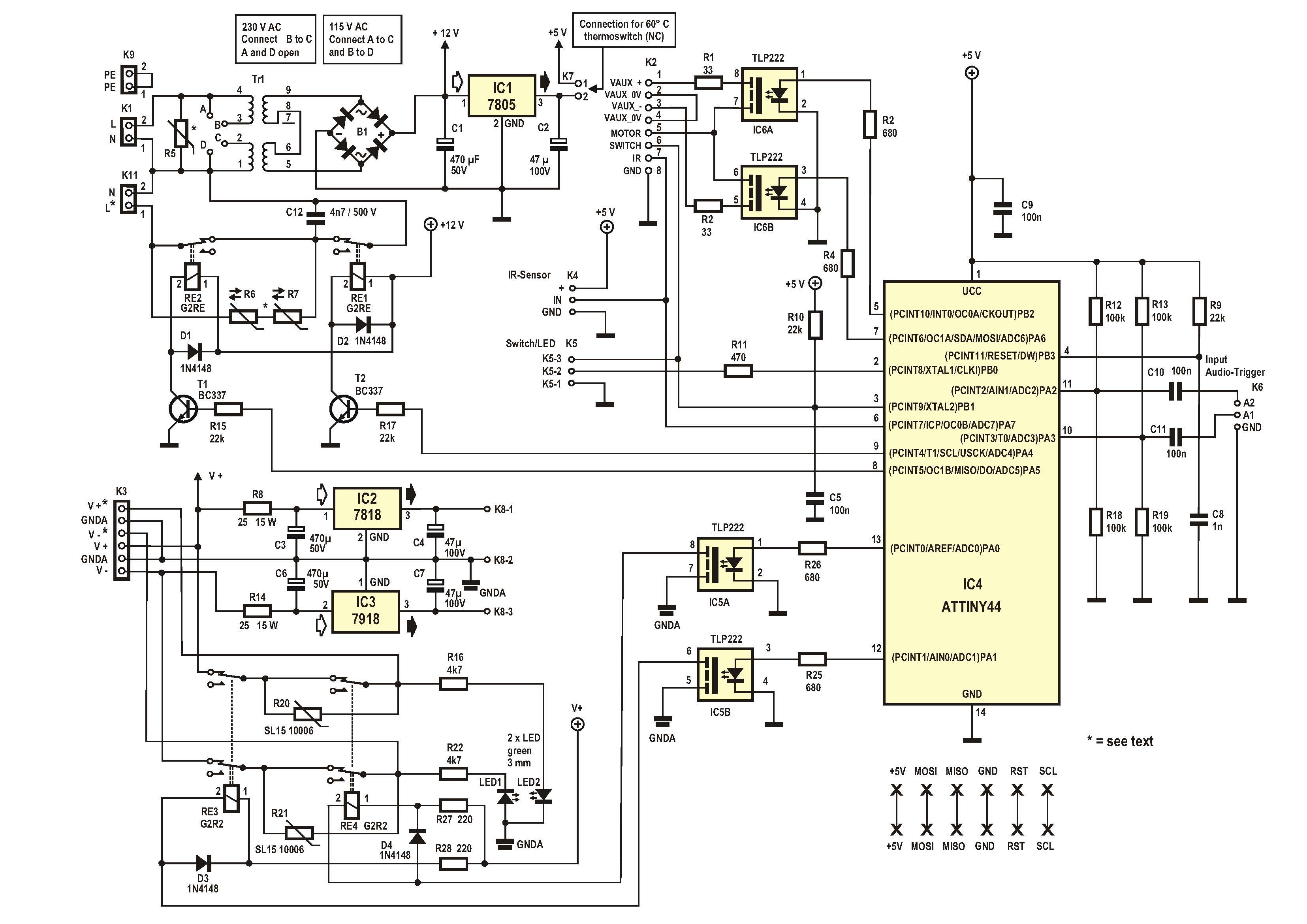
K9 heeft verder geen werkelijke functie maar dient slechts om een eventuele randaarde (PE, Protective Earth) comfortabel door te lussen.
De voedingsspanningen voor de versterker die door de schakelende voeding worden geleverd, komen als V+, GNDA en V– binnen op K3. Het bekende lineaire regelaarpaartje 7818/7918 (IC2 en IC3) maakt hier een extra gestabiliseerde voedingsspanning van ±18 V van ten behoeve van een eventuele voorversterker. V+ en V– gaan via de relais R3 en R4 als V+* en V–* naar de versterker. De beide groene LED’s dienen als statusindicatie.
De door de auteur gebruikte versterkervoeding levert nog een hulpspanning VAUX waarmee de motor van de motorpotmeter voor de volumeregeling wordt aangestuurd. Deze spanning komt binnen op connector K2 en wordt door de beide halfgeleiderrelais in IC6 naar behoefte doorgeschakeld naar de motor.
De schakelaar (druktoets) voor handmatig in- en uitschakelen wordt, samen met een aan/uit-LED, op K5 aangesloten. De IR-ontvanger wordt op K4 aangesloten.
De IR-ontvanger
De mogelijkheid om een IR-ontvangen aan te sluiten en de versterker zo op afstand te kunnen bedienen, is natuurlijk bijzonder aantrekkelijk. Er bleken echter een paar haken en ogen aan te zitten. Het grote probleem is uiteraard voor welke afstandsbedieningen (lees: welke dataprotocollen) de software geschikt moet zijn. Er zijn talloze IR-afstandsbedieningen in omloop, en eveneens talloze variaties van het IR-protocol.
Om deze reden heeft de auteur het idee laten varen om een specifieke afstandsbediening te gebruiken en de software daarop af te stemmen. In plaats daarvan is de software voor de softstart-unit zo opgezet dat deze – binnen zekere grenzen – enkele commando’s van gangbare IR-afstandsbedieningen kan leren.
Onder het motto “Keep it simple” ondersteunt de software niet meer dan drie commando’s, die voor de bediening van een audio-eindversterker echter voldoende zijn:
- aan/uit
- volume +
- volume –

We hebben gebruik gemaakt van een kant-en-klare IR-ontvanger; die zijn dermate goedkoop dat het niet loont zelf iets te gaan fabrieken. Bovendien decoderen zulke ontvangers (zie figuur 5) het ontvangen IR-signaal en leveren aan hun uitgang een gebruiksklaar gedemoduleerd signaal dat direct aan de microcontroller kan worden toegevoerd. Onder vindt u een heleboel nuttige informatie over dit onderwerp.
Tenslotte: op connector K7 kan (desgewenst) een thermostaatmodule worden aangesloten waarmee de versterker kan worden uitgeschakeld wanneer de temperatuur in de behuizing te hoog dreigt op te lopen (dat wil zeggen hoger wordt dan ongeveer 60 °C).
De software
De software is in assembler geschreven voor een ATTiny44; daarbij is gebruik gemaakt van ATMEL Studio 7. Dankzij de ruime hardwarefunctionaliteit van de ATTiny44 en het voldoend grote geheugen is uiteindelijk een compacte oplossing voor de softstart-unit uit de bus gekomen (zeker wanneer we de mogelijkheden ervan in aanmerking nemen). Voor de goede orde: we gaan hier niet uitgebreid op de code zelf in; wie dat leuk vindt kan de firmware downloaden en zelf uitpluizen.
Een van de meest interessante features van de ATTiny is de zogenaamde ‘Capture Function’ die we dankbaar voor de IR-ontvangst hebben gebruikt. Met behulp van deze functie laadt de µC bij elke flank van het signaal op de capture-ingangspin een kopie van de tellerstand van de 16bit-timer in het zogenaamde capture register. Op deze manier is een uiterst nauwkeurige (orde van grootte: microseconden) tijdmeting mogelijk.
Figuur 6 toont het toestandsdiagram van de software. De microcontroller bedient in totaal vier relais (K1...K4 in de figuur, RE1...RE4 in het schema) voor het inschakelproces. In figuur 6 is ‘button’ de druktoets voor het handmatig uitschakelen (zie verderop). Het proces verloopt sequentieel.

Als eerste activeert relais RE2 de thermistor R6/R7. Na korte tijd wordt de stroomkring gesloten door relais RE1, en na afloop van de wachttijd ‘wait1’ wordt relais RE2 weer afgeschakeld zodat de thermistor geen invloed meer heeft. De schakelende voeding voor de versterker is nu rechtstreeks met het lichtnet verbonden, maar is op dit moment nog onbelast.
Nu wordt de voedingsspanning naar de versterker doorgeschakeld. Als eerste schakelt relais RE4 de beide thermistoren R20 en R21 in de positieve en negatieve voedingslijnen van de versterker. Dit is gedaan om de ‘dikke’ bufferelco van de versterker stroombegrensd te laden. Hierdoor worden de betreffende componenten ontzien en wordt voorkomen dat de schakelende voeding in een kortsluitlus blijft ‘hangen’. Na weer een korte vertraging wordt de voedingsspanning door relais RE3 ‘hard’ doorgeschakeld.
Commando’s aanleren
De ‘leermodus’ voor de IR-afstandsbediening wordt geactiveerd wanneer we de idruktoets ingedrukt houden terwijl we de stekker van de softstart-unit in het stopcontact steken. Vervolgens drukken we op de gewenste toets van de afstandsbediening; de softstart-unit onthoudt het IR-signaal en slaat dat in EEPROM op. De LED geeft een geslaagde ontvangst aan. Om het tweede commando aan te leren, moet nogmaals op de druktoets worden gedrukt, evenzo voor het derde commando.
In totaal kunnen, zoals eerder al opgemerkt, drie commando’s worden opgeslagen. Het eerste commando is het aan/uit-commando, het tweede het commando volume+ (‘harder’) en het derde het commando volume– (‘zachter’).
Een laatste opmerking over de hardware
De hardware beschikt over een autostart-functie. Zodra een audiospanning aan de differentiële ingang van de microcontroller (pinnen 10 en 11) aanligt, schakelt de versterker zichzelf in op de manier die hierboven is beschreven. De schakeldrempel bedraagt ongeveer 20 mV. Wanneer gedurende een periode van ongeveer 5 minuten geen ingangssignaal wordt gedetecteerd, schakelt de versterker zichzelf weer uit. Het standby-verbruik van de schakeling is in dat geval minder dan 1 W. Het audiosignaal zelf wordt op connector K6 aangesloten.
De auteur gebruikt een schakelende voeding van het type SMPS300RE van Connex Electronics. Deze levert een extra hulpspanning van ±12 V, die wordt gebruikt voor de aansturing van de motorpotmeter van de versterker. Hiertoe schakelen de twee bidirectionele MOS-relais in IC6 ofwel de positieve ofwel de negatieve hulpspanning naar de motor door. De stroom wordt begrensd door weerstanden R1 en R2. Elk volume-commando schakelt de motor gedurende 500 ms in de gewenste draairichting in.
Wanneer de versterker is ingeschakeld, kan deze worden uitgeschakeld door de druktoets in te drukken.
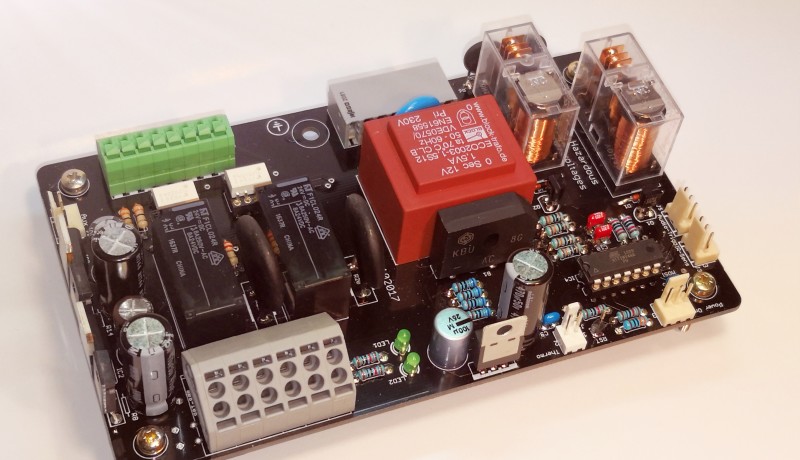
Bouw
Voor de softstart-unit is een (dubbelzijdige) print ontworpen – zie figuur 7. En het zal u ongetwijfeld een plezier doen dat dit een echt ‘ouderwetse’ print is, met uitsluitend through-hole componenten. Geen gepriegel dus met SMD’s.

We hebben het oorspronkelijke ontwerp van de auteur een beetje ‘geïnternationaliseerd’ – dat wil zeggen geschikt gemaakt voor zowel 230V-netspanning als voor 110V-netspanning. Dat betekent wel dat u bij de keuze en montage van enkele onderdelen moet opletten.
- In de eerste plaats de trafo. Dat is een exemplaar met 2 primaire wikkelingen. Voor 230 V moeten op de print de punten B en C worden doorverbonden (gebruik geïsoleerde montagedraad!) terwijl de punten A en D open blijven. Voor 115 V moet punt A met punt C worden verbonden en punt B met punt D (wederom: gebruik geïsoleerde montagedraad!).
- Dan de varistor R5. Deze heeft voor 230 V een andere waarde dan voor 115 V. Kijk hier goed in de onderdelenlijst!
- Tenslotte de thermistors R6 en R7. Deze hebben weliswaar dezelfde waarde (zie onderdelenlijst), maar voor 230 V moeten beide thermistors worden gemonteerd, terwijl voor 115 V uitsluitend R6 wordt gemonteerd en R7 door een (geïsoleerde!) draadbrug wordt vervangen.

Als laatste verdient connector K3 enige aandacht. De auteur heeft daar een Wago-printklem gebruikt, die op zich prima voldoet maar die buiten Duitsland wellicht lastig verkrijgbaar is. In plaats daarvan kunt ook een zespolige printkroonsteen met een steek van 5,08 mm gebruiken, bijvoorbeeld met Multicomp-type uit de onderdelenlijst. Let op: kiest u voor de Wago-printklem, dan dient u ook de bijpassende zespolige pinheader van Wago te bestellen!
 De print is uiteraard verkrijgbaar in onze shop, en datzelfde geldt voor de geprogrammeerde ATTiny44 (zie kader ‘In de store’). Wanneer u echter zelf uw controller wilt programmeren, dan kan dat ook. De firmware kan van de projectpagina bij dit artikel worden gedownload (gratis, zoals u van ons gewend bent). U kunt de ATTiny44 dan programmeren met een AVRISP, die op de corresponderende printpennen op de print (5V, MOSI, MISO, GND, RST en SCL) wordt aangesloten.
De print is uiteraard verkrijgbaar in onze shop, en datzelfde geldt voor de geprogrammeerde ATTiny44 (zie kader ‘In de store’). Wanneer u echter zelf uw controller wilt programmeren, dan kan dat ook. De firmware kan van de projectpagina bij dit artikel worden gedownload (gratis, zoals u van ons gewend bent). U kunt de ATTiny44 dan programmeren met een AVRISP, die op de corresponderende printpennen op de print (5V, MOSI, MISO, GND, RST en SCL) wordt aangesloten.
Last but not least: delen van de print voeren levensgevaarlijke spanningen; bouw het geheel daarom aanraakveilig in! Rest ons nog u veel nabouwplezier te wensen, en een lang en ongestoord luistergenot.
(170462-01)
---------------------------------------------
Wilt u meer van die fantastische Elektor-artikelen?
--> Neem vandaag nog een abonnement op Elektorlabs - u mist nooit meer een artikel, project of handleiding!
----------------------------------------------
Discussie (0 opmerking(en))