
Geef uw handy een hand...
op

Nou ja, geen hele hand, maar tenminste een vinger! De MobiLimb is het tastbare resultaat van een onderzoeksproject van Marc Teyssier, Gilles Bailly, Catherine Pelachaud en Eric Lecolinet (Telecom ParisTech, Sorbonne en CNRS).
Wat is MobiLimb?
MobiLimb is een component die van vorm kan veranderen en die aan draagbare apparaten kan worden bevestigd. Het is een kleine seriële robot-manipulator (met vijf vrijheidsgraden) die eenvoudig aan bestaande mobiele apparaten (smartphone, tablet) kan worden bevestigd (en even gemakkelijk weer kan worden verwijderd). Vergelijkbaar met protheses waarmee beperkingen van het menselijk lichaam overwonnen kunnen worden, wil MobiLimb de beperkingen van mobiele apparaten (statisch, passief, onbeweeglijk) overwinnen met behulp van een robotvinger.
Vormfactor
Deze benadering laat de vormfactor van mobiele apparaten onaangetast, en doet ook niet af aan de efficiëntie van hun I/O-mogelijkheden — integendeel: die worden juist uitgebreid:
- gebruikers kunnen de robotvinger manipuleren en van vorm veranderen (input);
- ze kunnen de robotvinger zien en voelen (visuele en tactiele feedback), ook en vooral wanneer de vorm ervan dynamisch door het mobiele apparaat wordt veranderd;
- als manipulator kan de robotvinger met andere modulaire elementen (LED’s, sensoren) worden uitgerust.
Hoe zit MobiLimb in elkaar?
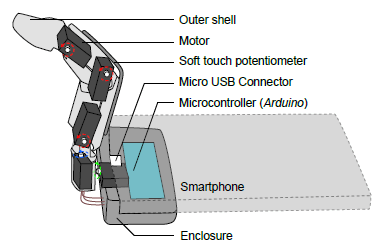
De hardware van MobiLimb (afbeelding: Marc Teyssier).
MobiLimb bestaat uit vijf beweeglijke gewrichten in serie en bestaat uit vier blokken: de actuatoren, de sensoren, de embedded elektronica en de controller.
Als actuatoren zijn vijf PZ-15320 servomotoren gebruikt die voldoende kracht kunnen ontwikkelen. De twee eerste motoren zijn haaks op elkaar aan de basis gemonteerd en dragen de drie andere die achter elkaar staan. Een 3D-geprinte structuur houdt de motoren bij elkaar zonder de bewegingen ervan te hinderen.
Servomotoren leveren hun positie (verdraaiing) als feedback. Op basis hiervan kan de positie worden berekend. Daarnaast is voorzien in een flexibele potentiometer die detecteert wanneer en waar de gebruiker de MobiLimb aanraakt.
In de basis van MobiLimb is een Arduino Leonardo Pro Micro ondergebracht, die de aansturing voor zijn rekening neemt.
De onderzoekers hebben een Android/Unity API ontwikkeld die het mogelijk maakt animaties te maken, op te slaan en af te spelen. Voor de verbinding tussen Arduino en Unity wordt Udunio gebruikt.
Esthetiek
Er zijn verschillende ‘bekledingen’ ontwikkeld: een klassieke robotvinger, eentje met bont en tenslotte een die er als een ‘echte’ vinger uit ziet (gemaakt van hetzelfde materiaal dat ook door de filmindustrie wordt gebruikt).
UIST
MobiLimb zal officieel worden gepresenteerd op het User Interface and Technology Symposium (UIST) in Berlijn, van 14 tot 17 oktober 2018.
Discussie (1 opmerking(en))