
Autonome auto’s met alleen GPS en camera's?
28 mei 2019
op
op
Verbeterde algoritmes maken het mogelijk: autonome auto’s kunnen zich met alleen camera’s en GPS (en kaarten) ook in onbekend terrein oriënteren. Onderzoekers van het MIT (Massachusetts Institute of Technology) hebben software ontwikkeld, waarmee auto’s net als mensen kunnen leren om de juiste route te vinden.
Met deze software hoeft de auto niet meer vooraf te trainen in nieuw terrein. Er is alleen geschikt kaartmateriaal nodig, om het voertuig ook op tot nu toe onbekende straten te kunnen laten rijden.
Om de software te trainen, stuurt een menselijke bestuurder het autonome voertuig door een stadsdeel. De software leert daarbij uit de verzamelde data van het rijgedrag bij bepaalde gebeurtenissen in het verkeer en bij hindernissen. Daarna kan de auto zonder problemen zijn weg vinden in een ander gebied.
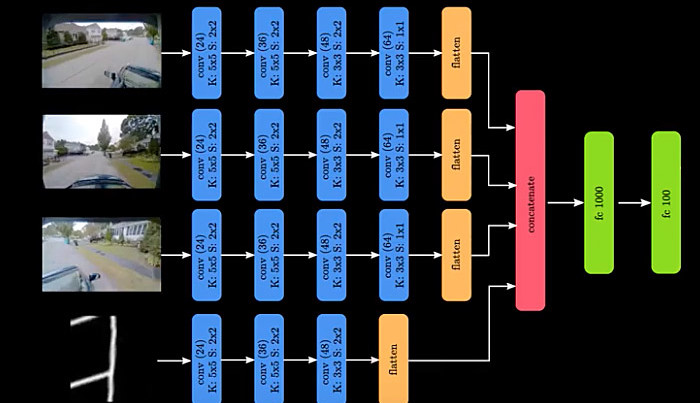
Autonome demonstratierit „End-to-end“. Video: MIT/Amini
De software is gebaseerd op het ambitieuze „End-to-End“-principe, waarbij sensordata rechtstreeks wordt vertaald naar rijgedrag. Tot nu toe waren oplossingen die werkten volgens dit principe alleen in staat om een auto door het actuele verloop van de straten te leiden en niet om van een bepaald startpunt naar een bepaald eindpunt te rijden. De autonome auto’s leren met de nieuwe software het juiste rijgedrag bij kruispunten, aftakkingen en kruisend verkeer. De software gebruikt de verkregen data niet alleen voor het herkennen van stopborden e.d., maar kan ook aan de hand van de wegmarkeringen detecteren, dat het voertuig een kruising nadert.
Zelfs bij inconsistenties tussen het wegverloop en kaartgegevens kan het voertuig nog veilig rijden: als het volgens de kaart bijvoorbeeld rechtsaf moet slaan, terwijl de straat rechtdoor gaat, dan wordt er doorgereden en wordt bij de eerstvolgende mogelijkheid rechtsaf geslagen. In de echte wereld leveren sensoren geen foutloze of eenduidige data. De software is ingericht om met dergelijke „ruis“ om te gaan en toch veilig te rijden en de weg te vinden.
Met deze software hoeft de auto niet meer vooraf te trainen in nieuw terrein. Er is alleen geschikt kaartmateriaal nodig, om het voertuig ook op tot nu toe onbekende straten te kunnen laten rijden.
Autonoom navigeren
Volgens de onderzoekers hebben mensen dankzij hun intelligentie een groot voordeel bij de oriëntatie in het wegverkeer in vergelijking met autonome auto’s: Voor mensen is hun zintuigelijke waarneming van de omgeving voldoende. Een autonome auto moet nieuwe gebieden eerst op een tijdrovende manier intern in kaart brengen en analyseren. Met de nieuwe software van het MIT kan nu ook een machine, zoals een auto, het rij- en oriëntatiegedrag van mensen imiteren. Daarvoor zijn dan, naast een camera, alleen GPS-data en eenvoudige wegenkaarten nodig.Om de software te trainen, stuurt een menselijke bestuurder het autonome voertuig door een stadsdeel. De software leert daarbij uit de verzamelde data van het rijgedrag bij bepaalde gebeurtenissen in het verkeer en bij hindernissen. Daarna kan de auto zonder problemen zijn weg vinden in een ander gebied.
Geringe datahoeveelheden
Voor de bij deze oplossing gebruikte kaarten is maar relatief weinig geheugenruimte nodig. Tot nu toe hadden autonome voertuigen additionele informatie van bijvoorbeeld LIDAR-sensoren nodig, waarmee ze extreem ingewikkelde kaarten aanmaken om te kunnen rijden. Voor het in kaart brengen van alleen San Francisco is al 4 TB aan data nodig. De software van MIT heeft, voor alle landen van de wereld, een geheugenruimte van maar 40 GB nodig, net als de kaarten van moderne navigatiesystemen voor menselijk gebruik. De software kan zich, alleen met behulp van de camera’s, aanpassen aan hindernissen die niet op de kaart staan. Daarbij wordt herkend, waar het obstakel zich precies bevindt op de weg.De software is gebaseerd op het ambitieuze „End-to-End“-principe, waarbij sensordata rechtstreeks wordt vertaald naar rijgedrag. Tot nu toe waren oplossingen die werkten volgens dit principe alleen in staat om een auto door het actuele verloop van de straten te leiden en niet om van een bepaald startpunt naar een bepaald eindpunt te rijden. De autonome auto’s leren met de nieuwe software het juiste rijgedrag bij kruispunten, aftakkingen en kruisend verkeer. De software gebruikt de verkregen data niet alleen voor het herkennen van stopborden e.d., maar kan ook aan de hand van de wegmarkeringen detecteren, dat het voertuig een kruising nadert.
Zelfs bij inconsistenties tussen het wegverloop en kaartgegevens kan het voertuig nog veilig rijden: als het volgens de kaart bijvoorbeeld rechtsaf moet slaan, terwijl de straat rechtdoor gaat, dan wordt er doorgereden en wordt bij de eerstvolgende mogelijkheid rechtsaf geslagen. In de echte wereld leveren sensoren geen foutloze of eenduidige data. De software is ingericht om met dergelijke „ruis“ om te gaan en toch veilig te rijden en de weg te vinden.
Read full article
Hide full article
Discussie (0 opmerking(en))